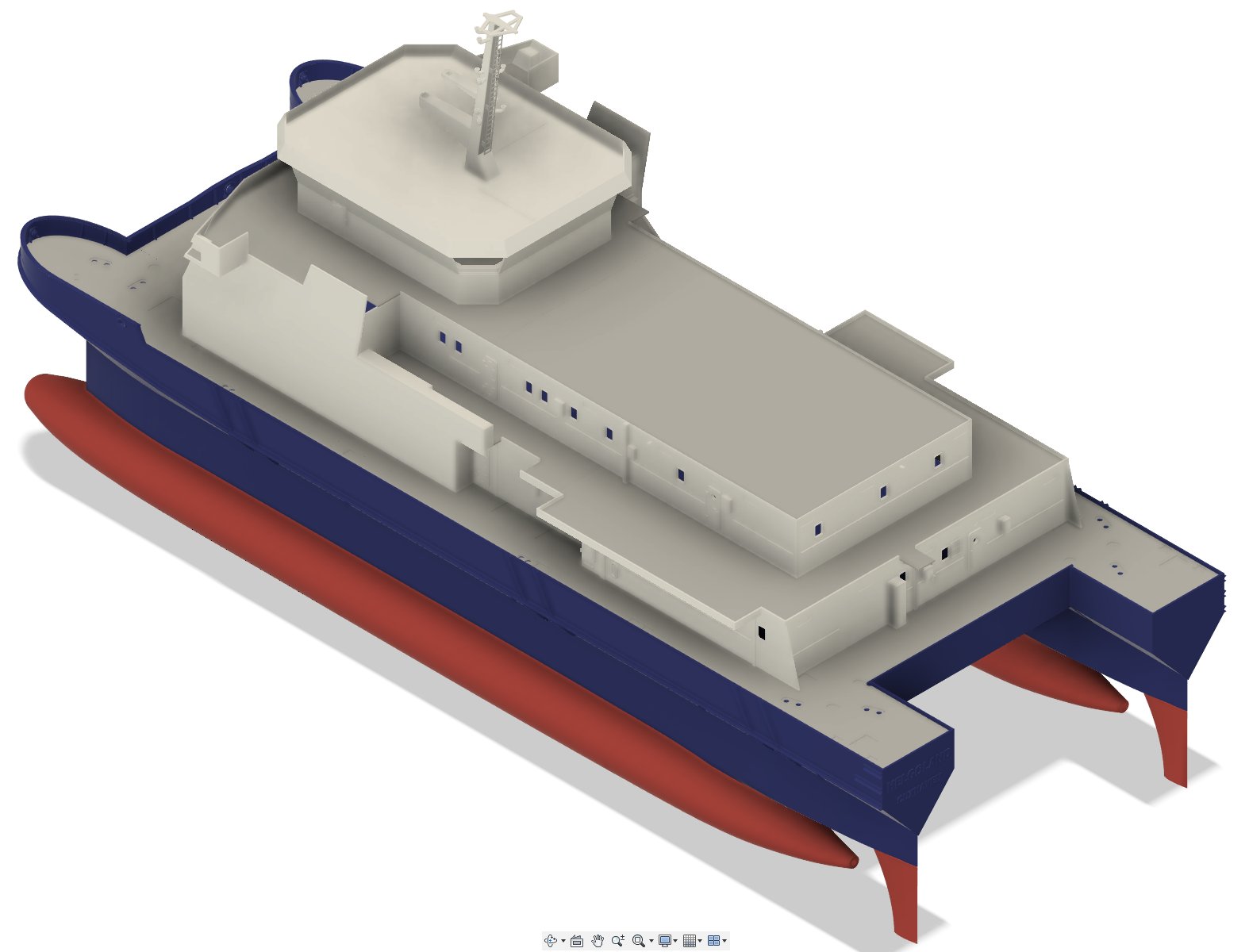
Modell
des Zollkreuzers Helgoland
ZOLLKREUZER
HELGOLAND

Letzte
Bearbeitung am 05.03.2025
Der Bericht wir laufend aktualisiert,
wobei das neueste immer unten zu finden sein wird.
22.01.2024
Durch
Zufall habe ich auf dem Kanal vom NDR eine Dokumentation über den
Zollkreuzer Helgoland gesehen, und fand die Konstruktion
als SWATH
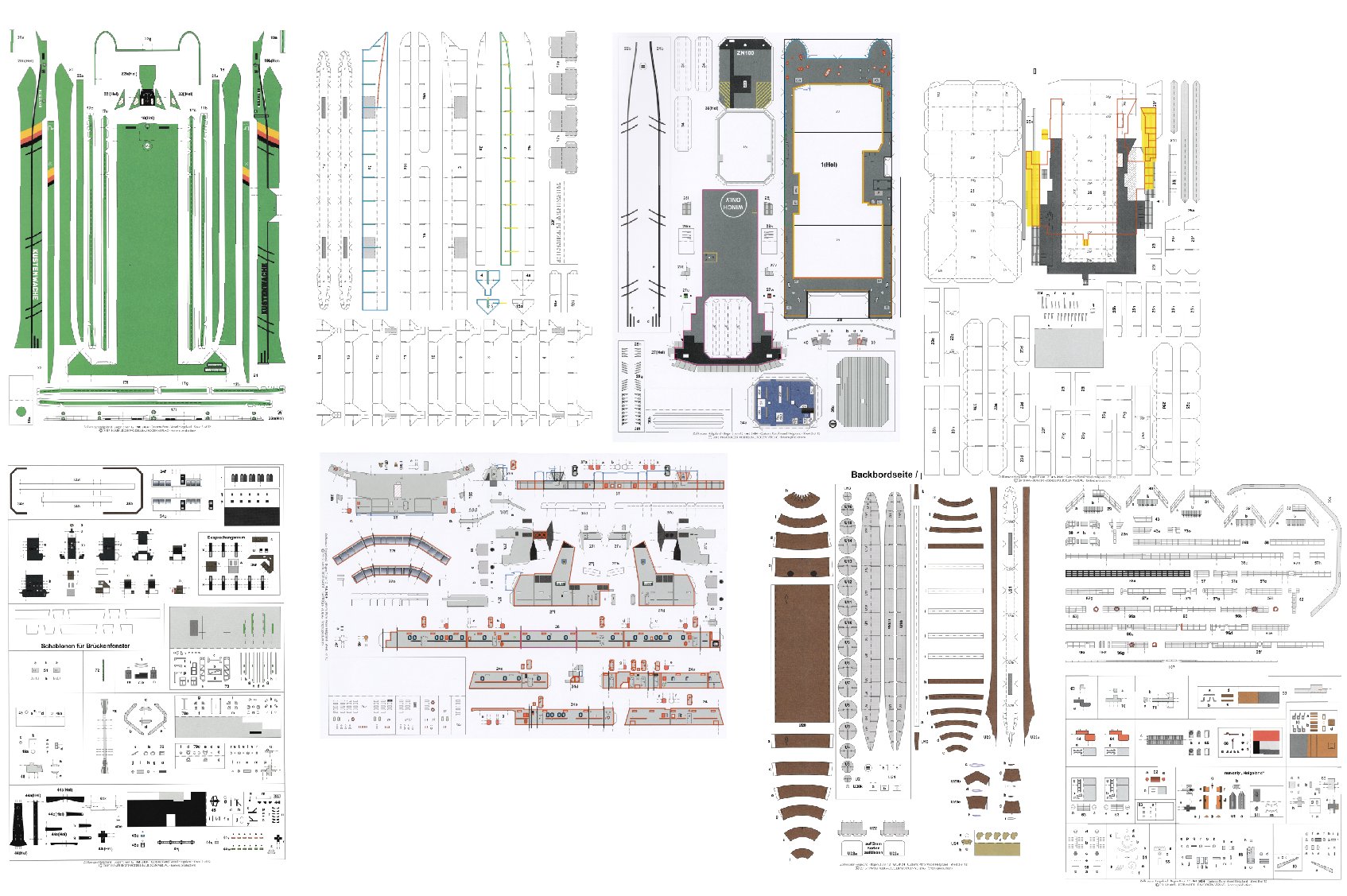
Schiff hochinteressant. Ich habe mir dann den Bauplan für das
Papiermodell des Zollkreuzers von der Firma HMV [Hamburger
Modellbaubogen Verlag] zugelegt, und mir die ersten Gedanken zur
Konstruktion, und zur Erstellung des Modells in 3D-Druck gemacht.
Nach der Durchrechnung eines möglichen passenden Maßstabes habe ich
mich auf den Maßstab 1 zu 50 festgelegt. Daraus
ergeben
sich dann die folgenden Daten:
|
|
|
|
|
|
|
|
|
|
|
Original
|
|
M
1 : 50
|
|
|
|
|
|
|
Verdrängung
|
1559
|
kg
|
6,485
|
kg
|
|
|
|
|
|
Länge
|
49,35
|
m
|
0,987
|
m
|
|
|
|
|
|
Breite
|
19
|
m
|
0,380
|
m
|
|
|
|
|
|
Tiefgang
|
4,55
|
m
|
0,091
|
m
|
|
|
|
|
|
Geschwindigkeit
|
37,04
|
km/h
|
0,20
|
m/s
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d
= D * 1000 / M³ * VF
|
|
|
|
|
|
|
|
|
|
d
= Modellverdrängung
|
|
|
|
|
|
|
|
|
|
D
= Verdrängung des Originalschiffes in Tonnen
|
|
|
|
|
|
|
|
|
|
1000
= Umrechnung in kg
|
|
|
|
|
|
|
|
|
|
M
= Modellmaßstab
|
|
|
|
|
|
|
|
|
|
km/h
durch 3,6 = m/s
|
|
|
|
|
|
|
|
|
|
VF
Kreuzer 0,52
|
|
|
|
|
|
|
|
|
|
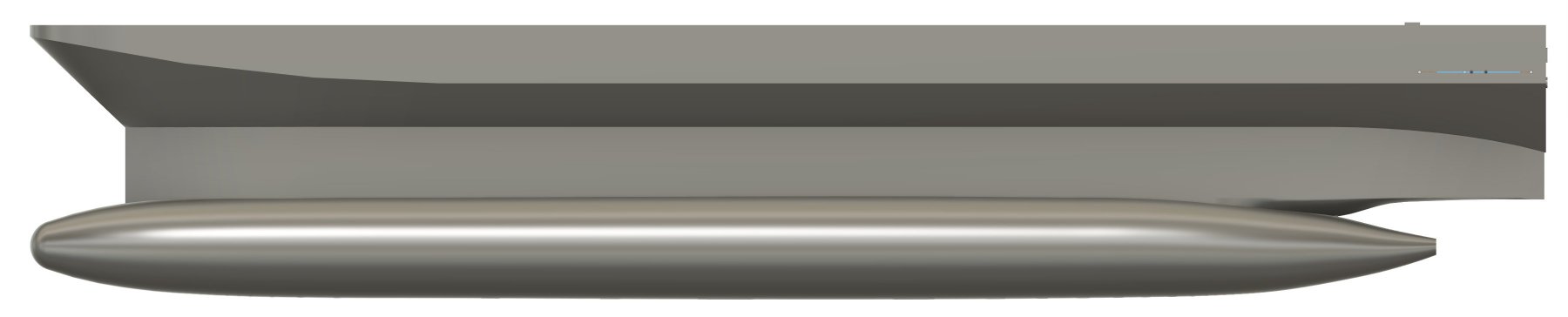
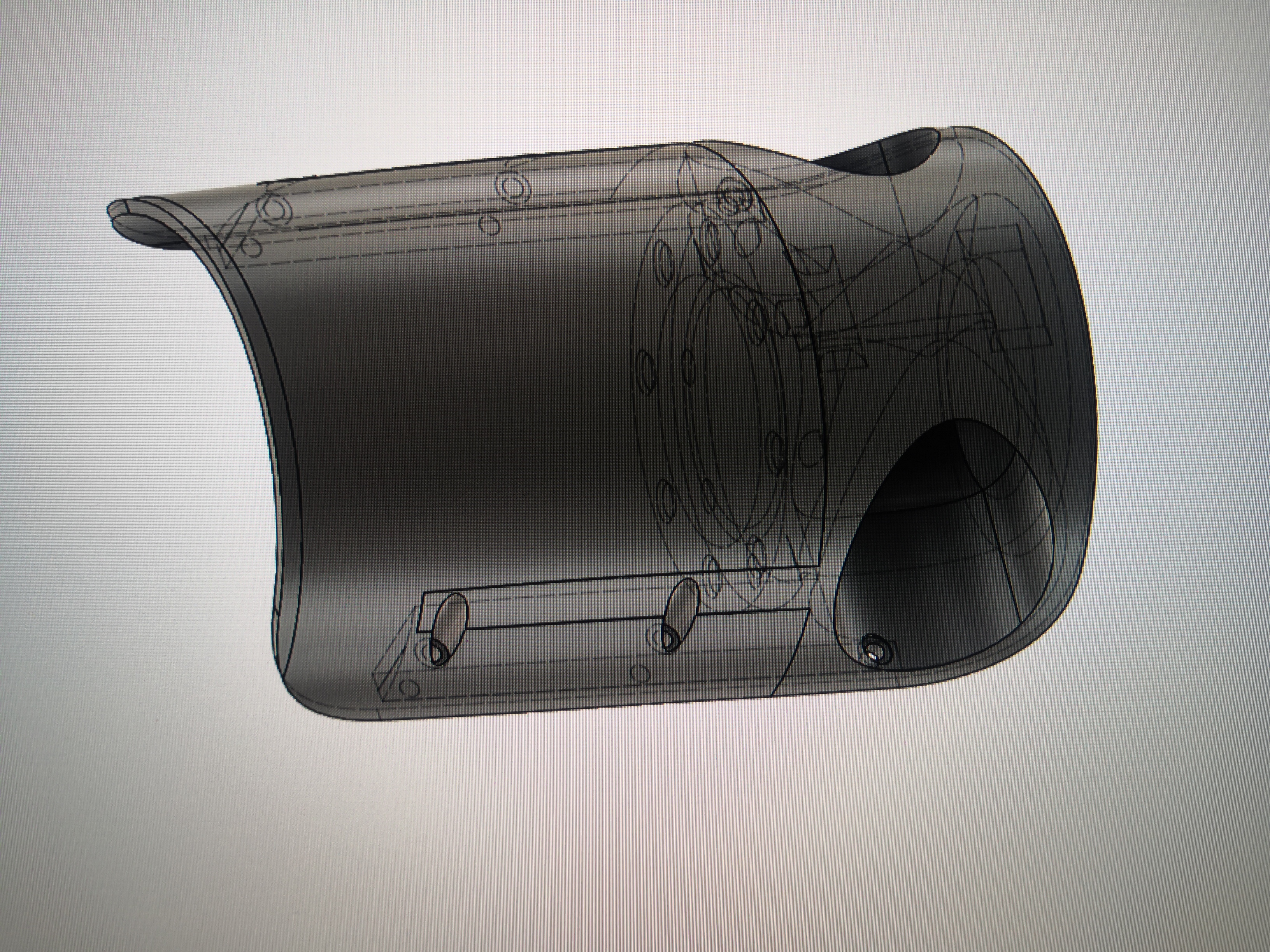
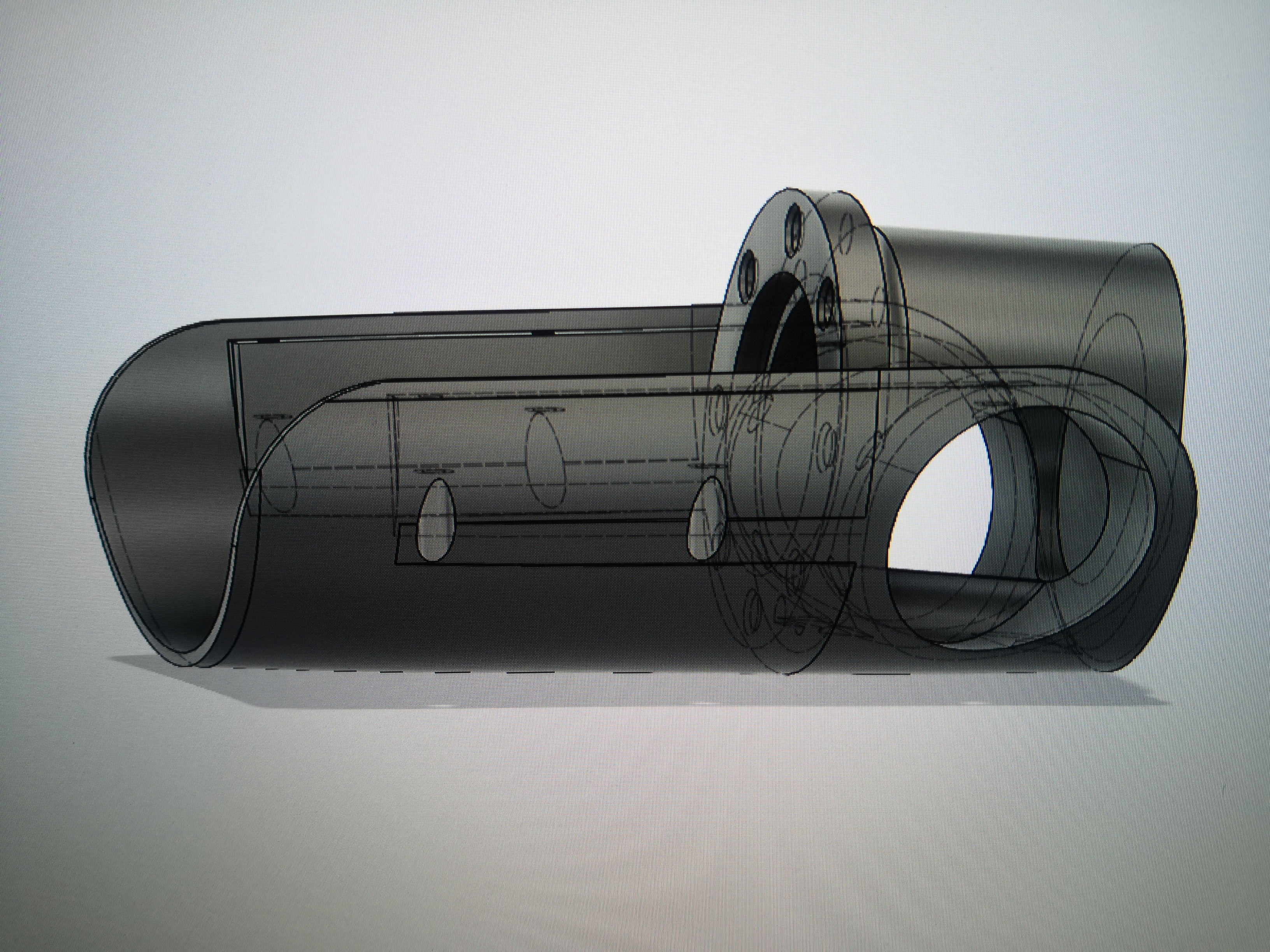
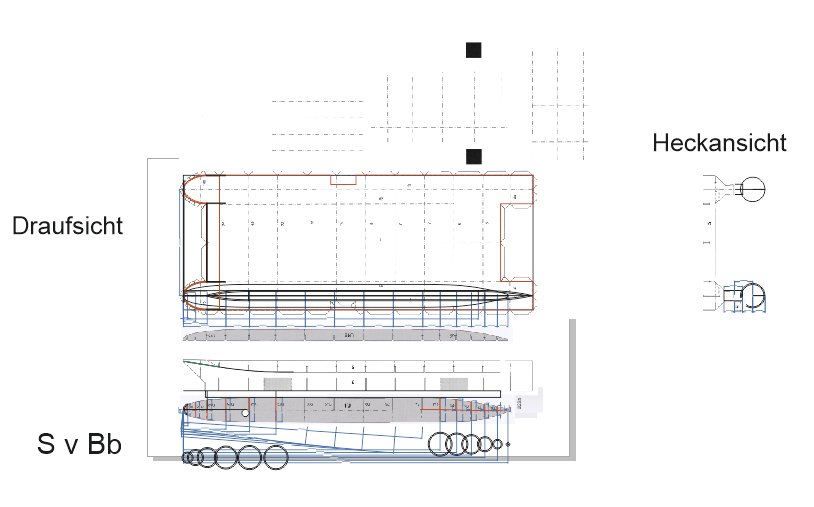
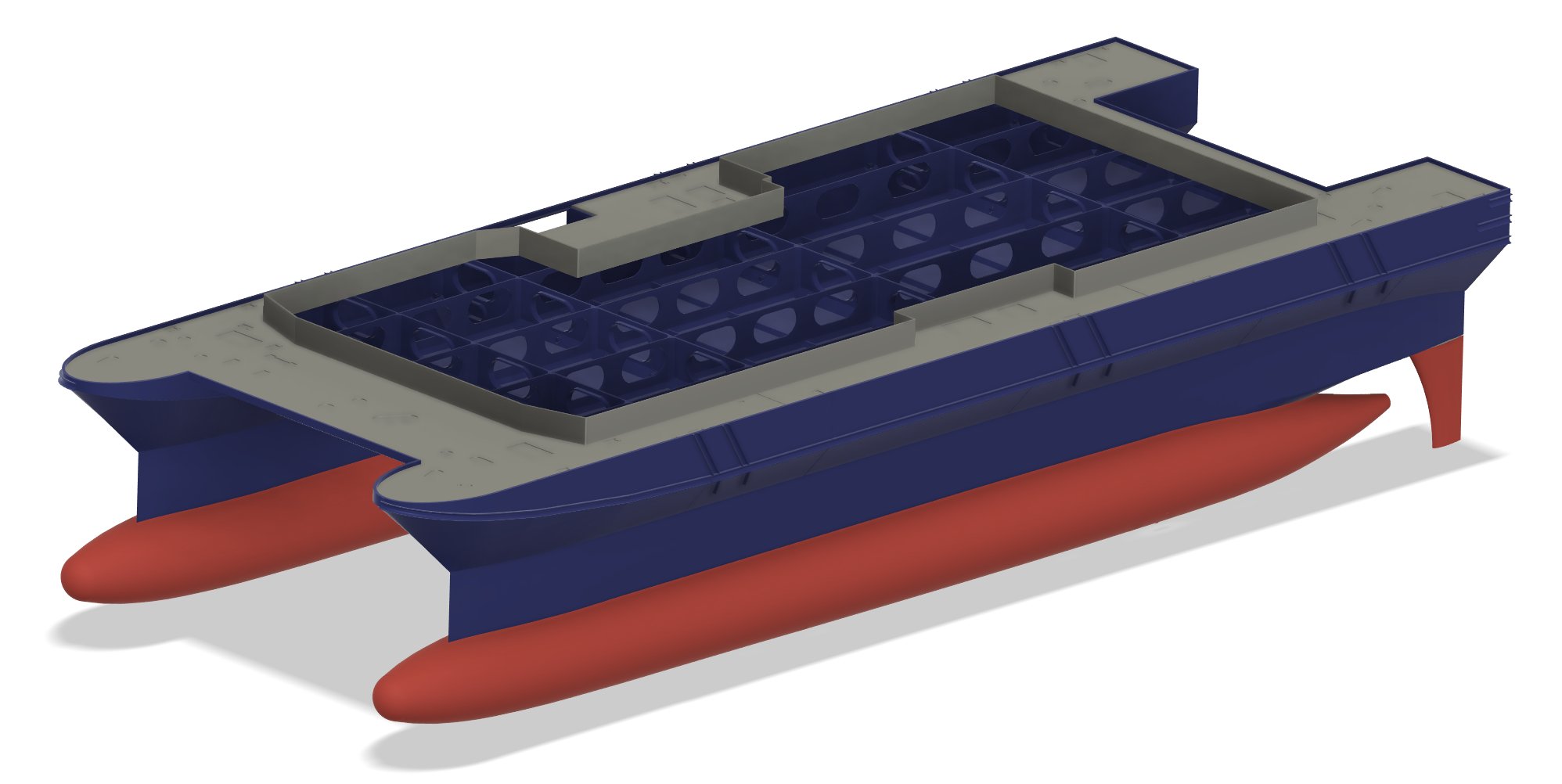
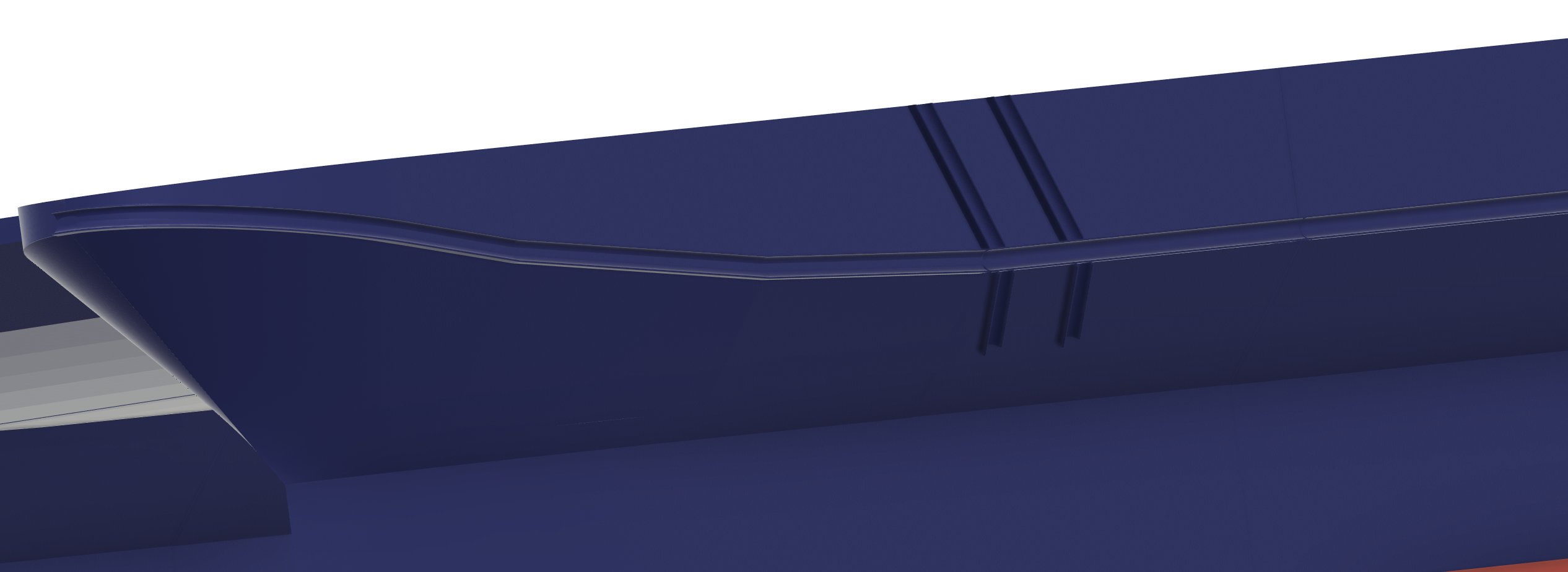
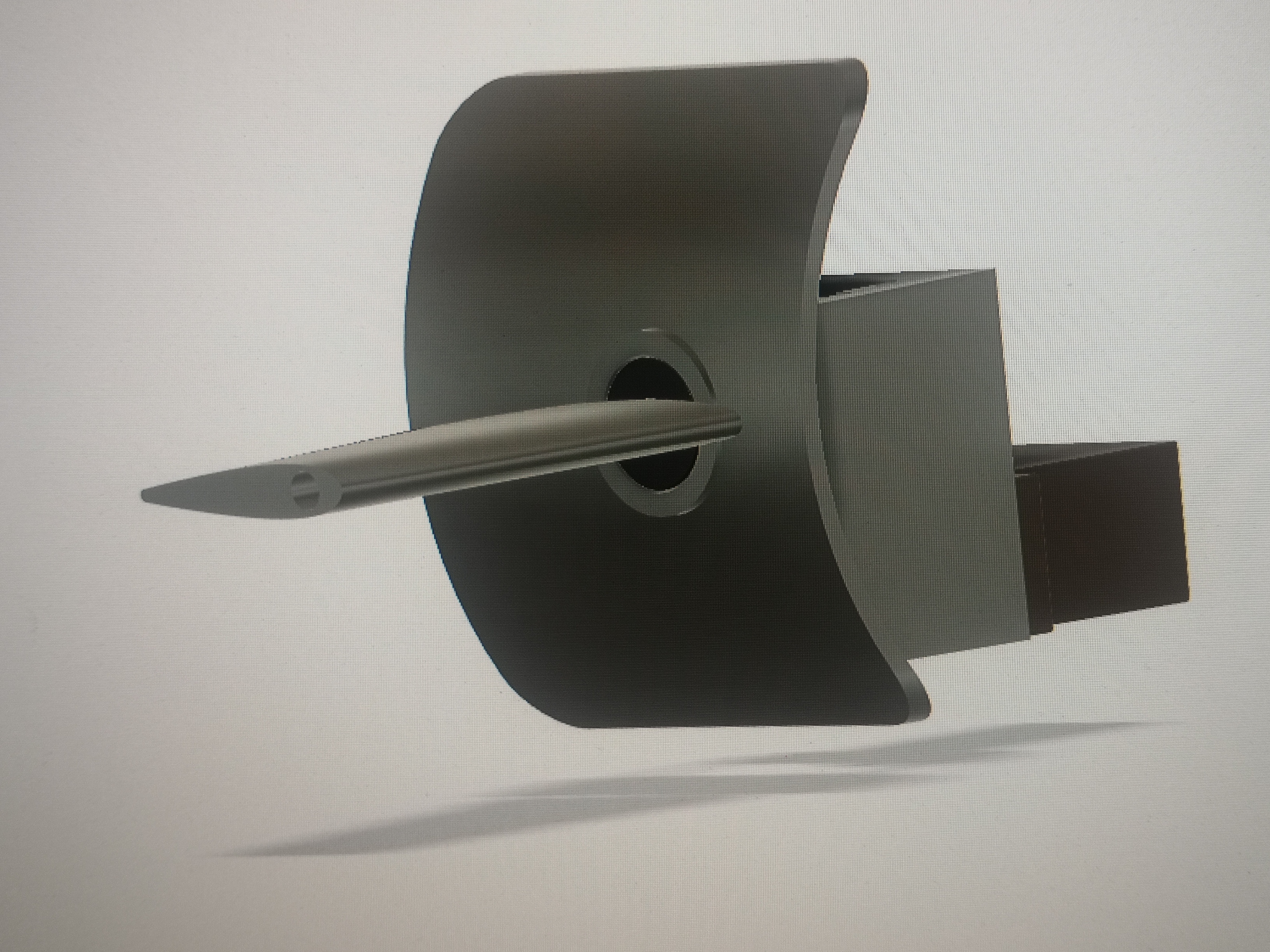
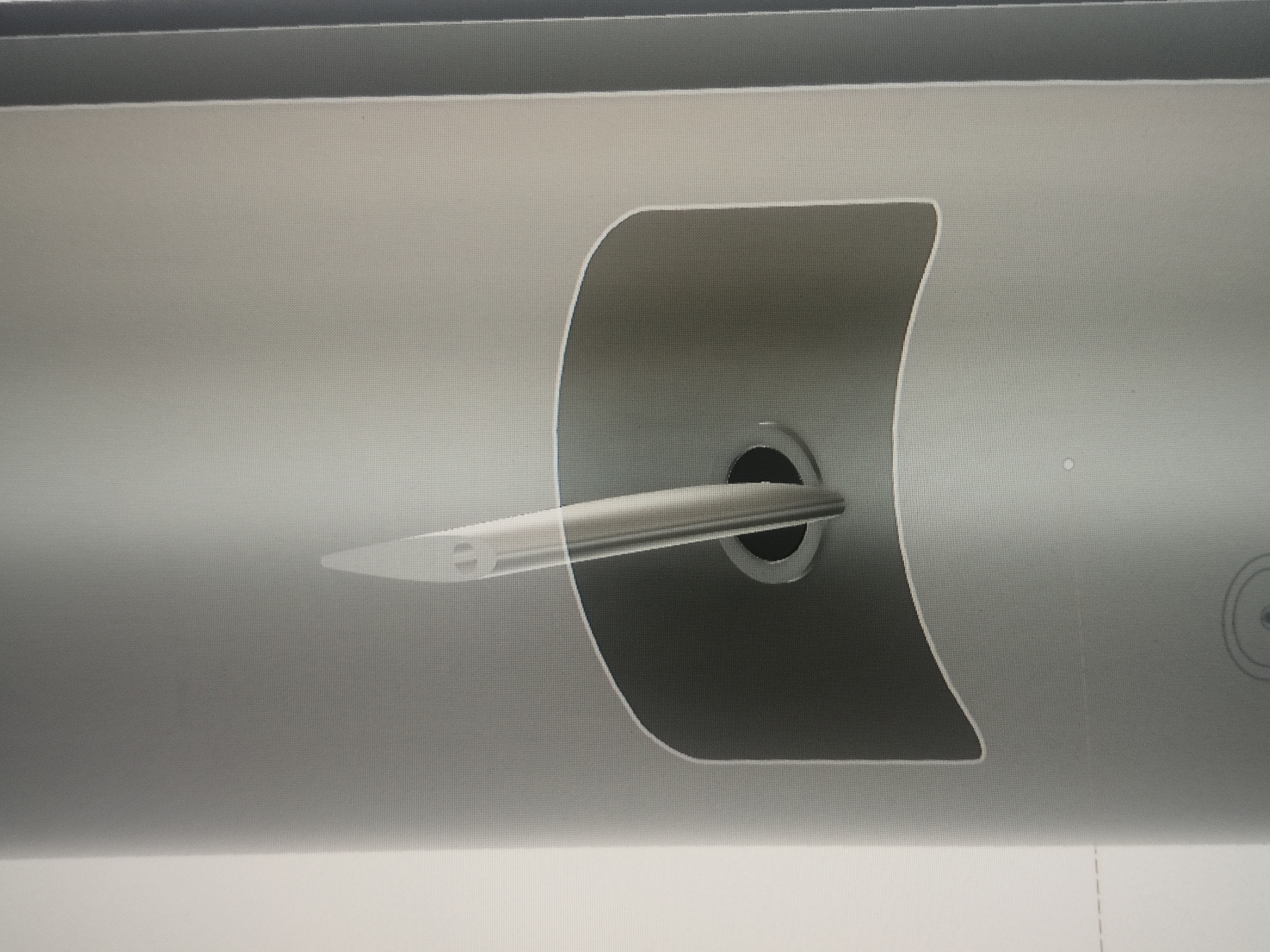
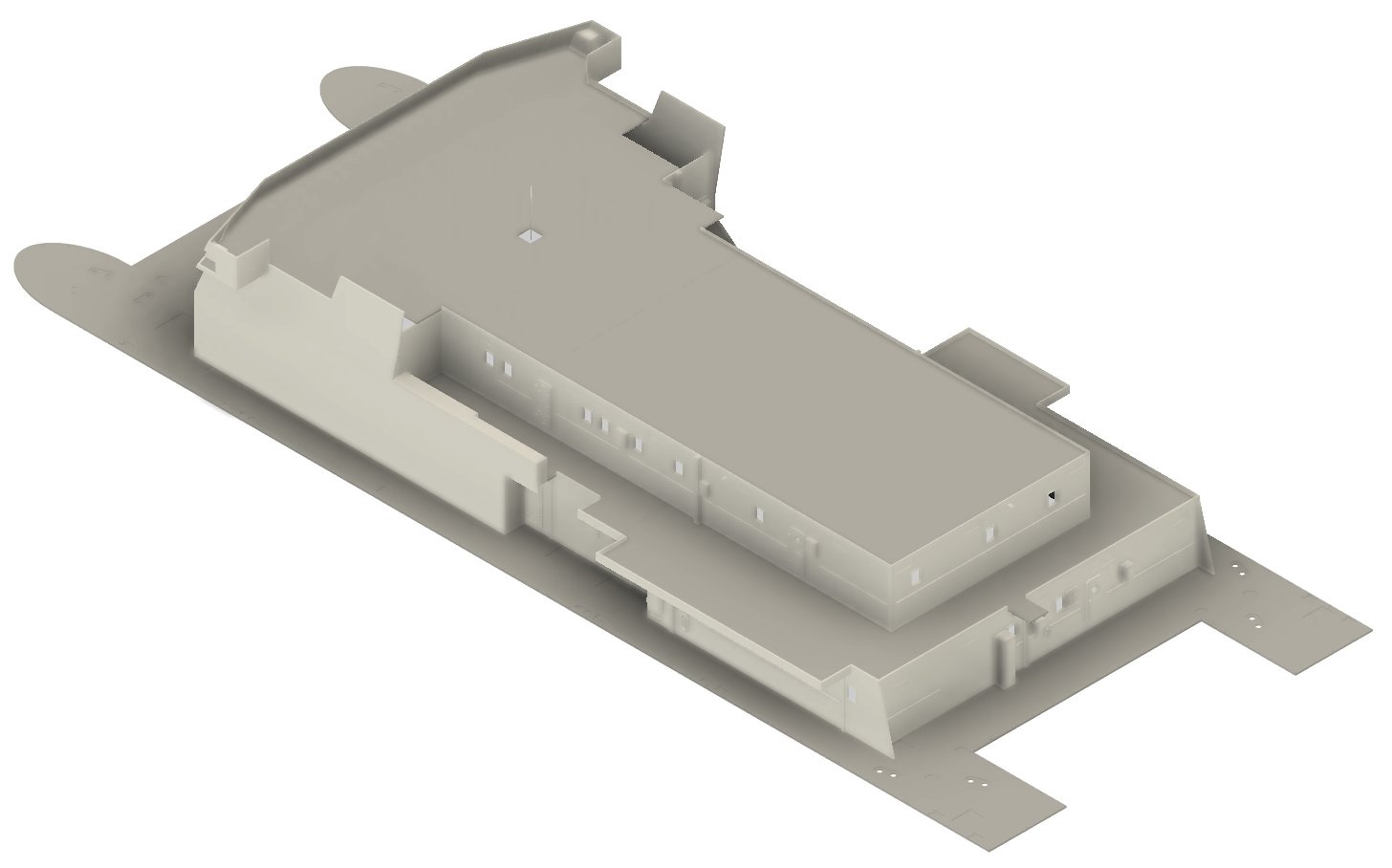
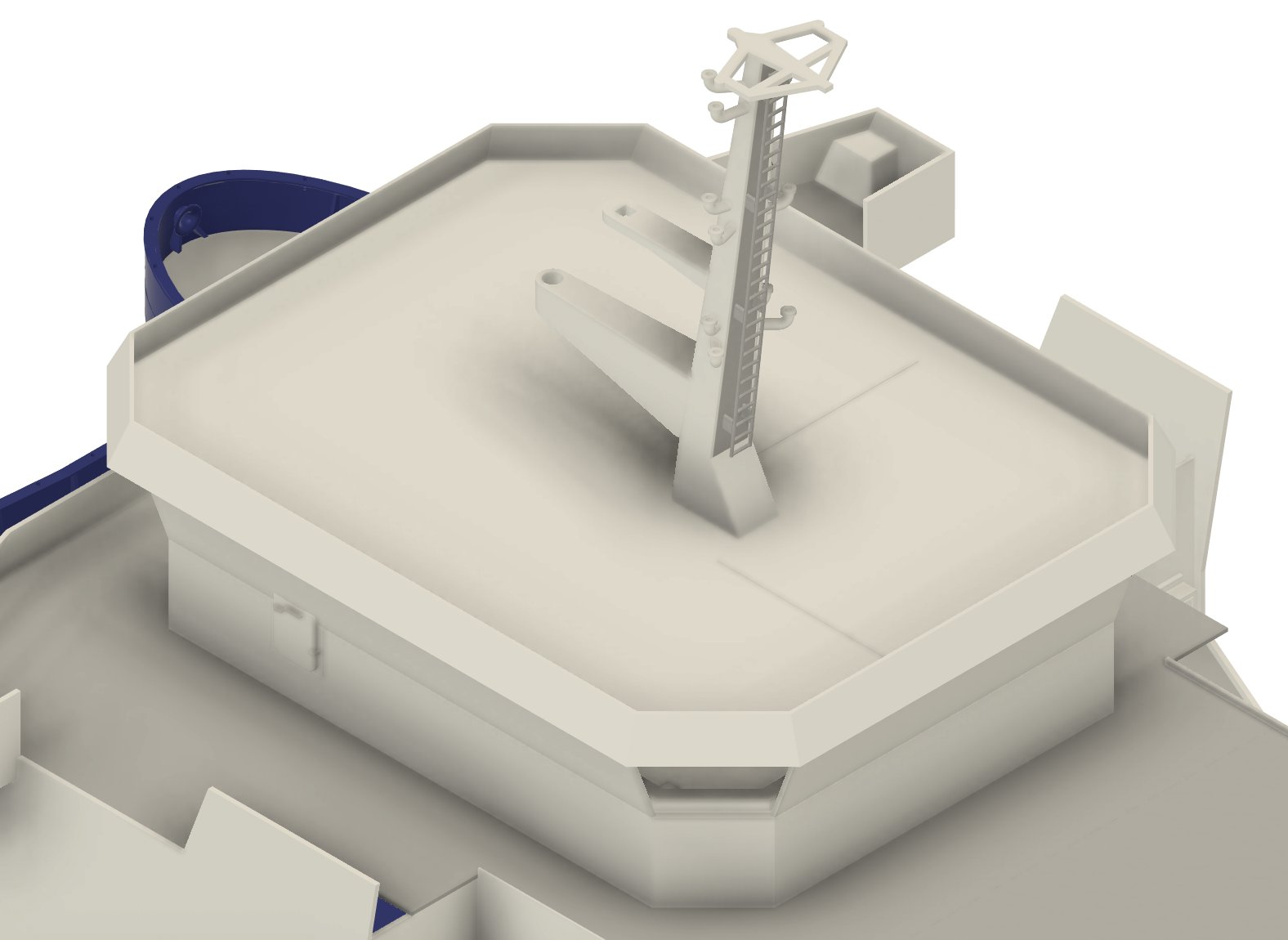
Da
man auf dem Bild oben ja nur zwei drittel des Schiffes sieht hier nun
mal das, was das Schiff so
interessant macht, ohne Aufbauten:
Nachdem
ich dann die ersten konstruktiven Ergebnisse mit Fusion 360 auf dem
Bildschirm hatte kamen die ersten bedenken auf, was die Verdrängung
und Gewicht angehen. Ich habe mich dann weiter schlau gelesen, und
dabei festgestellt, das zur Berechnung der Modellverdrängung ein
gewisser Formfaktor mit einfließen muss. Für Kreuzer und ähnliche
Modelle ist die der Faktor 0,52. Somit ergab sich für die
Verdrängung und Gewicht des Modells eine Reduktion um fast die
Hälfte, was mir erst mal gar nicht gefiel. Bei weiterem durchrechnen
des Modells und eine annähernde Berechnung der Schwimmkörper kam
ich dann auf ein maximales Gesamtgewicht und Verdrängung von gut 6,8
kg.
Daraufhin habe ich meine geplante Gesamtkonstruktion
in mehrere Einzelkonstruktionen aufgeteilt und mich langsam von unten
nach oben hoch gearbeitet. Daraus ergab sich dann das erste
Pflichtenheft für das Modell wie folgt:
Schwimmkörper in
mehrere Sektionen aufgeteilt, Spitze, Bugstrahlruder, Energieträger,
Antrieb.
Das Bugstrahlruder ist Servicefreundlich und gemäß
U-boottechnik mit Magneten als Kraftübertragung auszuführen.
Die
Schwimmkörpermodule sind mittels Bajonettverschluss zu einander zu
verbinden.
Aufteilung der Grundkonstruktion in:
1.
Schwimmkörper mit angeschlossenem Formkörper, um darauf das
Verbindungsstück zu stecken.
2. Verbindungsstück zwischen
Schwimmkörper und Rumpfschale.
3. Rumpfschale mit Quer- und
Längsversteifung.
4. Für den Servicefall mehrere
Durchgangsschrauben M4 mit Einschmelzmuttern in den beiden
Schwimmkörpern.
5. Jeweils für Bugstrahlruder,
Energieversorgung und Antrieb einen Durchgang nach oben für die
Steuerung und Versorgung.
Definition
von SWATH = Small Waterplane Area Twin Hull
zu
deutsch
Doppelrumpf mit geringer
Wasserlinienfläche
https://de.wikipedia.org/wiki/Small_Waterplane_Area_Twin_Hull
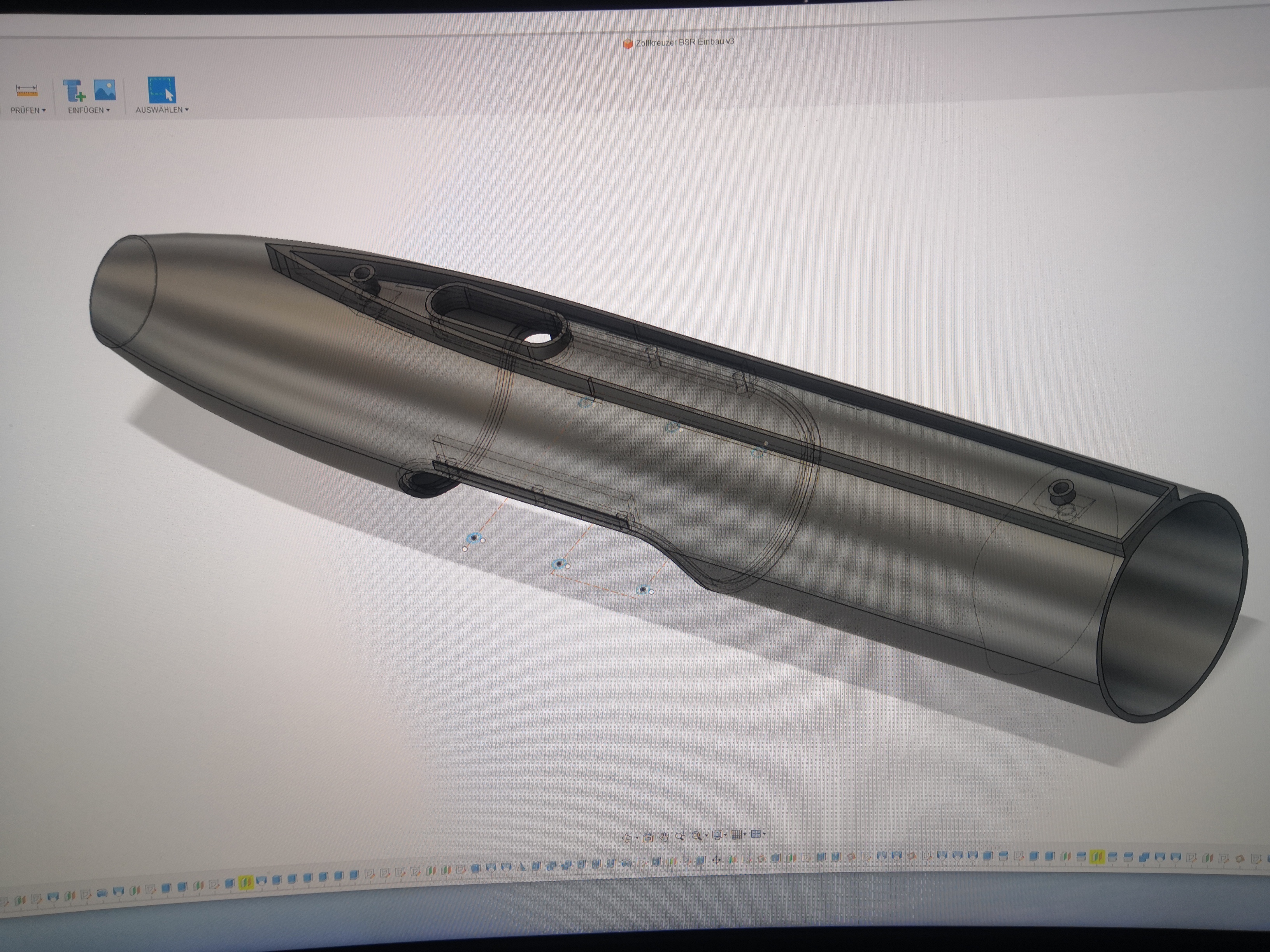
Entwicklung des Modells mittels Fusion360 mit den
folgenden Einstellungen zum Projekt an sich:
Die Ausführung als
SWATH-Schiff ist neu.
Ein SWATH Schiff als Modell ist äußerst
selten auf den Teichen gesehen.
3D-Druck Erfahrung ist
vorhanden.
Andere Anwender bauen Ihre Modelle mit der gleichen
Technologie.
Spezielle Erfahrungen sind durch Versuche zu
ermitteln.
Die Grundkonstruktion ist mit dem FDM - Verfahren zu
drucken.
Feinere Details sind über das SLA - Druckverfahren
oder anderes zu erreichen.
Erste
Auslegung und Testdrucke zur Überprüfung der Machbarkeit:
Aus
dem gescannten Bauplan wurde mittels Corel Draw der Plan der Bauteile
auf den passenden Maßstab vergrößert. Die ersten Skizzen wurden
gemacht, und schon viel dabei die erste Besonderheiten auf. Der
Schwimmkörper zieht sich nach hinten, Walgleich, leicht nach unten,
um dann wieder nach oben zu schwingen. Also keine saubere Symmetrie,
was strömungstechnisch jedoch durchaus Sinn macht. Dies bedingt für
den Antrieb eine gesonderte Betrachtung außerhalb der Symmetrie.
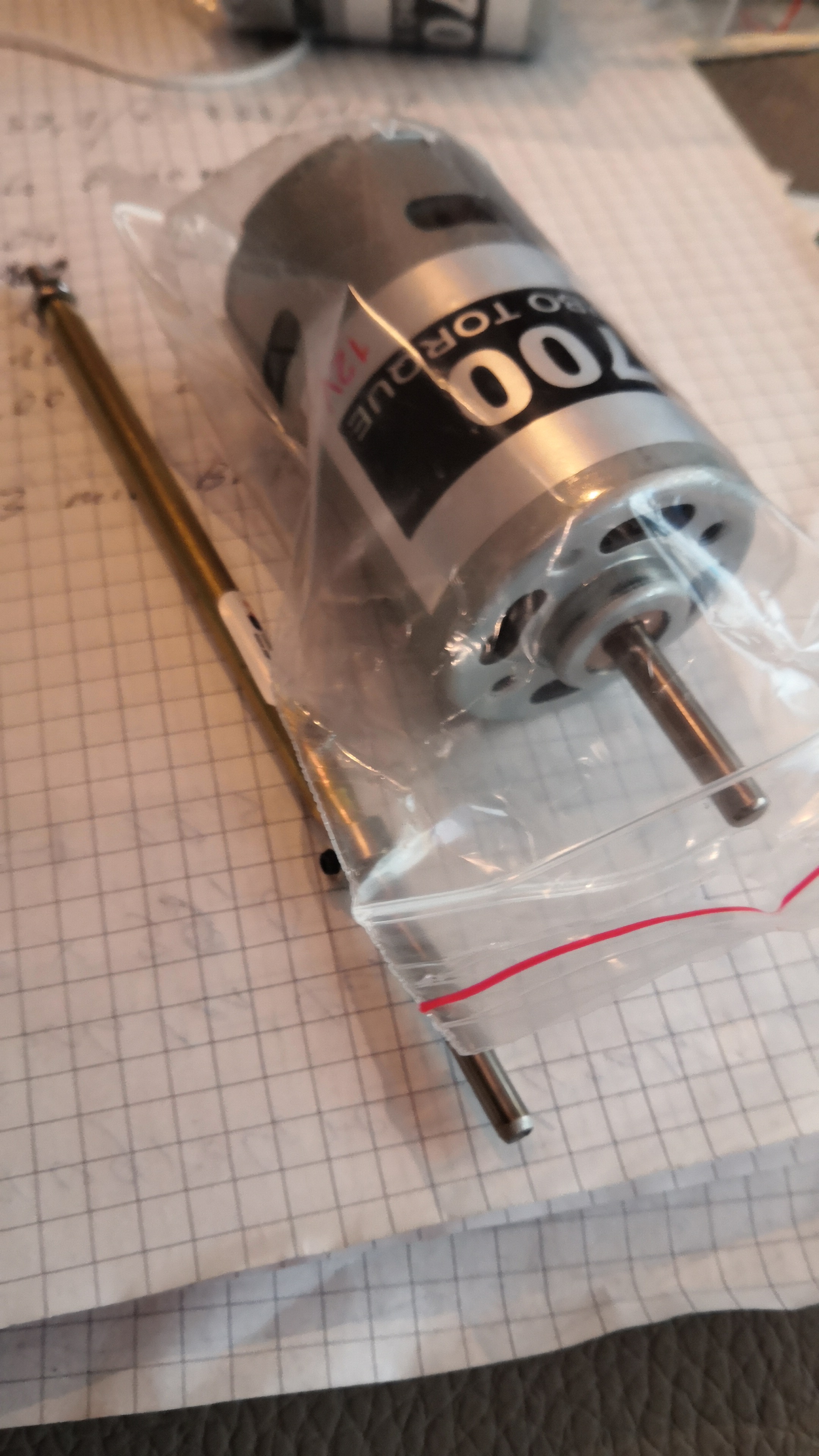
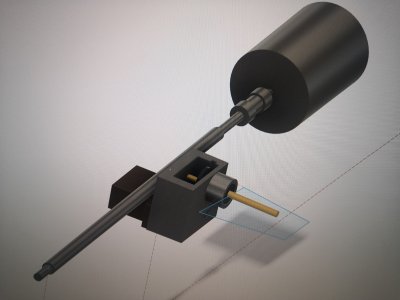
Danach wurde der Antrieb nach der ersten Auslegung bestellt: Der
Motor MIG 700 TURBO hat auf jeden Fall einen starken Drehmoment, kam
dann aber mit 308 Gramm doch ziemlich schwer daher. Von daher habe
ich doch eine Brushless - Antrieb 3650 2300KV gewählt, wo der Motor
mit 176 Gramm doch etwas besser in die Rechnung passt, und bei
Wassereinbruch dann doch noch läuft. Der dazu mitgelieferte
Fahrtsteller kann 60 Ampere ab, was man wahrscheinlich selten
brauchen wird. Dazu habe ich noch ein Programmiermodul mitbestellt,
um das Anlaufverhalten zu beeinflussen.
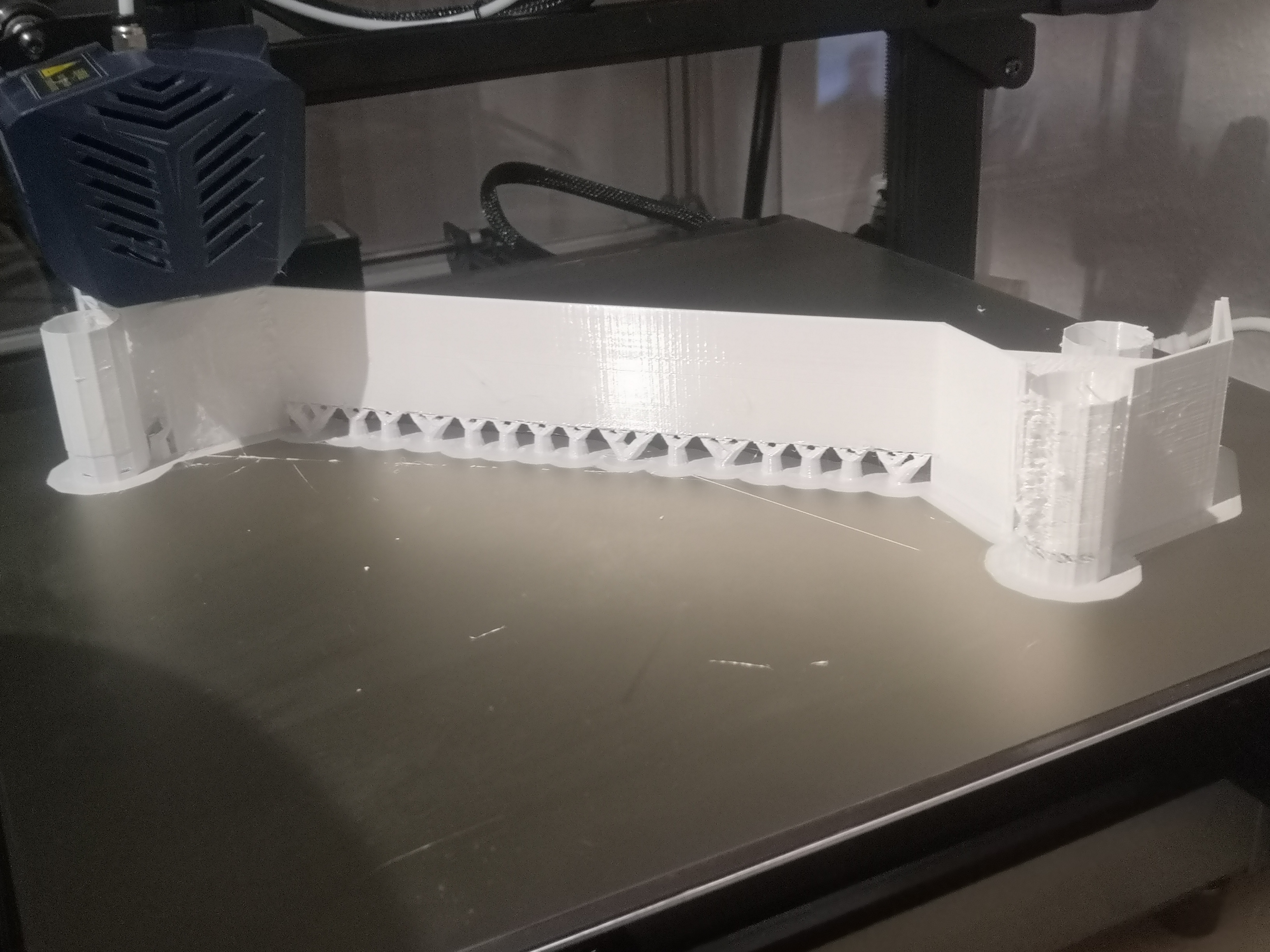
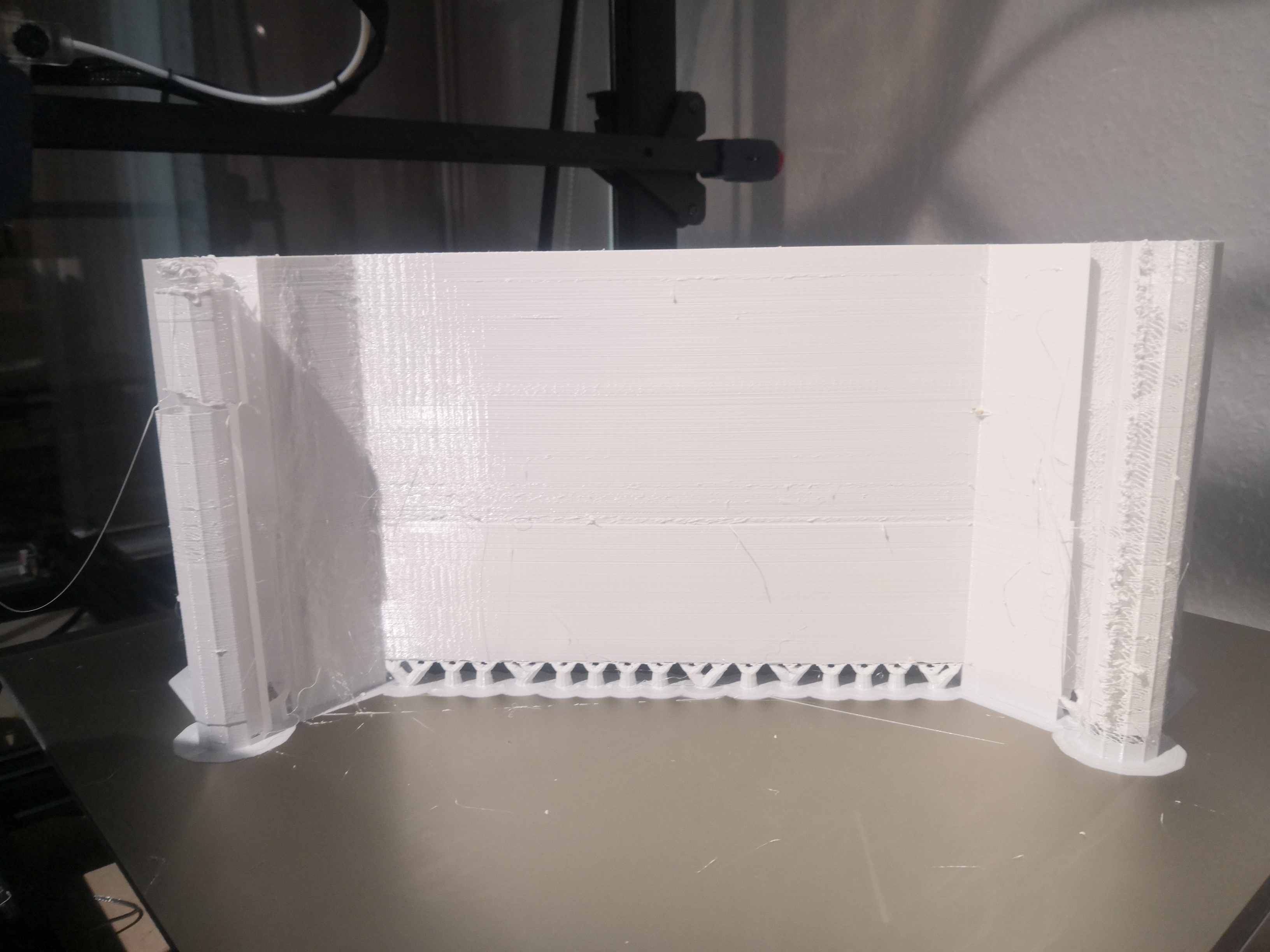
Der Druck
der bisherigen Teile hat sich als soweit gut dargestellt, alle Teile
sind soweit von hoher Festigkeit und nicht zu schwer. Bei der
Rumpfschale über Wasser tauchten auch gleich die ersten Probleme
auf. Dummerweise musste ich die Filament-rolle wechseln, was der
Druck übel genommen hat. Der Druck ist in der Mitte nicht homogen
und durchgängig, die Mittelplatte ist instabil und sogar
nachträglich gebrochen. Der nächste Versuch diese Mittelelemente zu
drucken wird sein, Elemente zwischen 100 bis 200 mm Höhe zu drucken,
wobei eine Passkante oben und unten von ca. 8 mm Breite an dem
Element sein wird, unten mit Löchern zum Einführen von oben mit
gedruckten Passstiften. Die Höhe ist abhängig von den bereits
geplanten und gedruckten vertikalen Durchbrüchen, die hier mit
beachtet werden müssen. Das soll zum einen das Verkleben der Module
vereinfachen, und zum anderen eine gewisse Steifigkeit quer zur
Schiffsachse in die Schale bringen. Es werden aber sehr
wahrscheinlich noch einige Längs- und Querspanten in die Schale
eingeklebt werden müssen, um eine gewisse Festigkeit da hinein zu
bekommen. Das wird dann die kommenden Wochen getestet. Auch die
Einbringung einer Wabenkonstruktion ist zu testen. Hier als Beispiel
genannte sei die Baukörperkonstruktion von Ikea-Schrankelementen.
Dies findet sich auch in manchen Küchen, wo die Einlegeplatten
wirklich kaum Durchbiegung erfahren, trotz Belastung.
Sobald die
passenden Kupplungen angekommen sind, so werde ich den Antrieb
schwingungsgedämpft neu aufbauen, und dann die Schwimmkörper mit
Bajonett fertig drucken. Bis dahin werden dann auch die Verbinder
gedruckt und zusammen verklebt sein, und der Aufbau des kompletten
Rumpfes kann beginnen. Geklärt werden muss noch die Situation mit
den Lithium Eisen Akkus, die da in den Rumpf noch rein sollen. Alles
möglichst in die Schwimmkörper, wegen der Schwerpunktlage.
25.01.2024
17 Uhr
Die Teile aus dem Schrottdruck sind ja letztendlich
nicht verkehrt, als dass diese als Versuchsobjekte benutzt werden
können. Ich habe den Fehldruck des ersten Mittelstückes vom Heck
mit den Endstücken auf Backbord- und Steuerbordseite zusammen
gesetzt und verklebt, und wegen dem Fehler in der Höhe den
Heckspiegel neu gedruckt und das alles zusammen geklebt. Für die
Laschenverklebung habe ich 5 Minuten Epoxid verwendet, für den
Heckspiegel dann mal den Cyancrylat-Kleber. Die Laschenverklebung ist
machbar, aber doch schwer zu händeln. Die Teile müssen exakt für
die Verklebung vorbereitet sein, und man muss das ganz 5 Minuten lang
festhalten, oder mit speziellen Klebehilfen fixieren. Wie schon
geahnt zeigt sich die Konstruktion des oberen Rumpfaufbaus als
komplex und kritisch. Wenn ich die Verbindungsstücke als Beispiel
nehme, so habe ich auch hier eine Wabenkonstruktion, kombiniert mit
quer- und Längsspanten zu planen, um eine bestmögliche Steifigkeit
des Rumpfaufbaus zu erhalten. Das, was ich da gerade so in der Hand
halten kann (Foto) ist teilweise stabil, aber im ganzen in Quer-und
Längsachse doch recht labil und verwindet sich doch teilweise sehr.
Auf jeden Fall muss ich auch das Oberdeck da mit einplanen, um die
gesamte Steifigkeit des oberen Rumpfteiles zu erreichen.
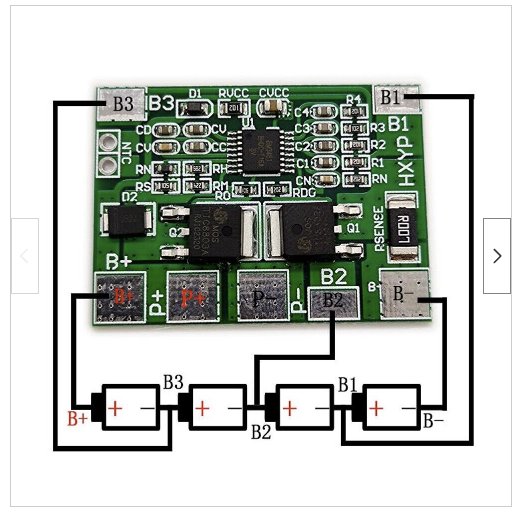
Des
weiteren habe ich ja noch das Problem der Energieversorgung. Mir
wurde geraten mich auf LiFePO4 Akkus zu konzentrieren, welche
gegenüber den LiPo - Akkus doch einige Vorteile haben, auf die ich
jetzt aber nicht eingehen möchte. Ich habe da eine Vorschlag aus dem
Freundeskreis des SMC Peine bekommen, der aber noch nicht bestätigt
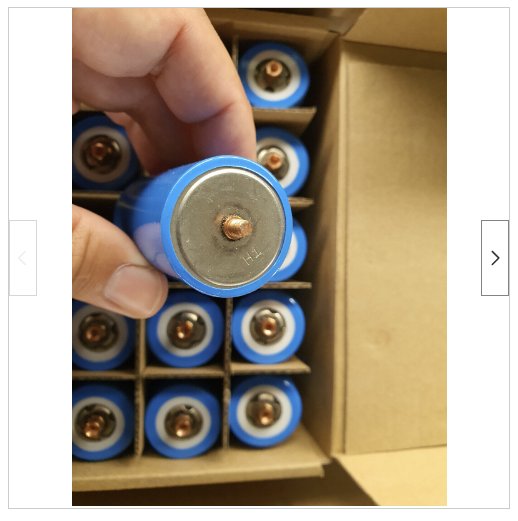
ist. In der Bucht habe ich da eine sehr interessanten Akku gefunden,
mit dem ich derzeit liebäugle. LiFePO4 3.2V 6Ah 6600mAh
Lithium-Ionen Akku. Diese kann man zusammenschrauben, und es gibt
auch die passende Schutzelektronik für das Laden dieser Akkus, die
auf jeden Fall empfohlen wird. Ich kann diese auf jeden Fall auch mit
meine Ladegerät laden, dem ALC 8500-2 Expert, der für 98% aller
Ladesituationen geplant wurde. Im Moment bin ich aber von den Preisen
enttäuscht, aber so ein Paket mit 100 Stück klingt vom Preis gut.
Inzwischen
habe ich den Druck der Verbinder Elemente für die Steuerbordseite
angestoßen, da diese durchkonstruiert und passend sind. Mein Drucker
ist also die kommenden Tage beschäftigt. Ich warte noch auf die
neuen Kupplungen, damit ich den Antrieb testen kann. Dieser soll dann
in einer Einheit in den hinteren Rumpfbereich schwingungsgedämpft
eingebaut werden, wobei ich die Details erst mit der Kupplung klären
kann.
01.02.2024
Es gibt Neuigkeiten in
Bezug auf:
1. die Technik
2. die Entwicklung des Models
3.
die Historie des Schiffstyps.
1. Zur Technik In der Nacht
vom 29. auf den 30. Januar 2024 habe ich natürlich mal wieder einen
Teil meines Schlafes auf dem Sofa vor geholt. Bedingt dadurch war ich
um 02:00 Uhr wach und konnte nicht einschlafen. Also habe ich mich
vor den PC gesetzt und mal geschaut wer denn schon mal so ein SWATH-
Schiff gebaut hat. Dabei wurde ich auf dem RC-Modellbau-Schiffe Forum
fündig. So einige Randinfo fand ich sehr interessant, was mich
allerdings sehr Aufmerksam machte war die Erfahrung des
Fahrverhaltens des SWATH-Schiffes im Detail. Grundsätzlich gilt,
dass dieser Schiffstyp aufgrund seiner Konstruktion doch sehr stabil
bei etwas rauerer See ist. Was darüber hinaus passieren kann war
aber gar nicht mehr lustig. Starker Seegang kann das Schiff zu
starkem Rollen bringen, was im Extremfall bis zum kentern des
Schiffes führen kann. Somit habe ich mir die weiteren Details dazu
angesehen, und die Empfehlung zu Herzen genommen, die im Original
verbaute Flossenstabilisierungsanlge doch im Detail zu beachten und
weiter umzusetzen, was ich anfangs ausgeschlossen habe. Ich habe dann
einfach mal 4 alte Servos aus dem Fundus geholt, Graupner C 605 und C
505, und diese mittels Verteilerkabel an eine Servotester
angeschlossen. Alle 4 Servos liefen soweit einwandfrei. Nun kam der
eine vorhandene Lageregler von Norbert Brüggen zum Einsatz, um zu
prüfen ob die Anordnung von Servos entsprechend dem Original
praktisch möglich ist. Soll heißen: Tieferes Eintauchen an
Backbordseite soll die dortigen Servos die Anlage zum Auftauchen
ansteuern, auf Steuerbordseite zum Abtauchen, und umgekehrt. Nach dem
ich die Servos so passend hingedreht habe, so war die passende
Drehbewegung an allen Servos korrekt. Es müssen keine Umbauten an
den Servos in Bezug auf die Drehrichtung vorgenommen werden. Laut der
Dokumentation sind handelsübliche Servos dafür durchaus
ausreichend. Nun, die Testservos waren schon etwas betagter, darum
habe ich mich dazu entschlossen den Typ MG 90 S zu verwenden, die ich
in meinem Gato-Modell verwendet habe. Da diese Metallgetriebe haben,
so sollten diese der Belastung durchaus standhalten, so hoffentlich
auch der E-Motor. Was bei der detaillierten Betrachtung noch aufviel
war, dass die Neutralstellung bei den Servos nicht unbedingt
bedeutet, dass die Köpfe der aufzusteckenden Ruderarme zu einander
gleich ist. Hier ist schon eine geringe Abweichung von ein paar Grad
zu verzeichnen. Das wäre bei langsamen Manövern durchaus zu
verschmerzen. Bei höherer Geschwindigkeit jedoch schon von mehr
Bedeutung und Auswirkung. Wie ich damit im Detail umgehe werden wir
sehen. Da ich davon ausgehe, dass das Modell eh bei eher ruhiger See
fahren wird ist das eher zweitrangig. Eine Einstellung an allen
Flossen mit ein paar Grad aufwärts wird sicher nicht falsch sein.
Jedoch schon bei Überlegung einer starken Ruderlage könnte das ganz
an sich ein Vorteil sein. Wir werden es sehen.
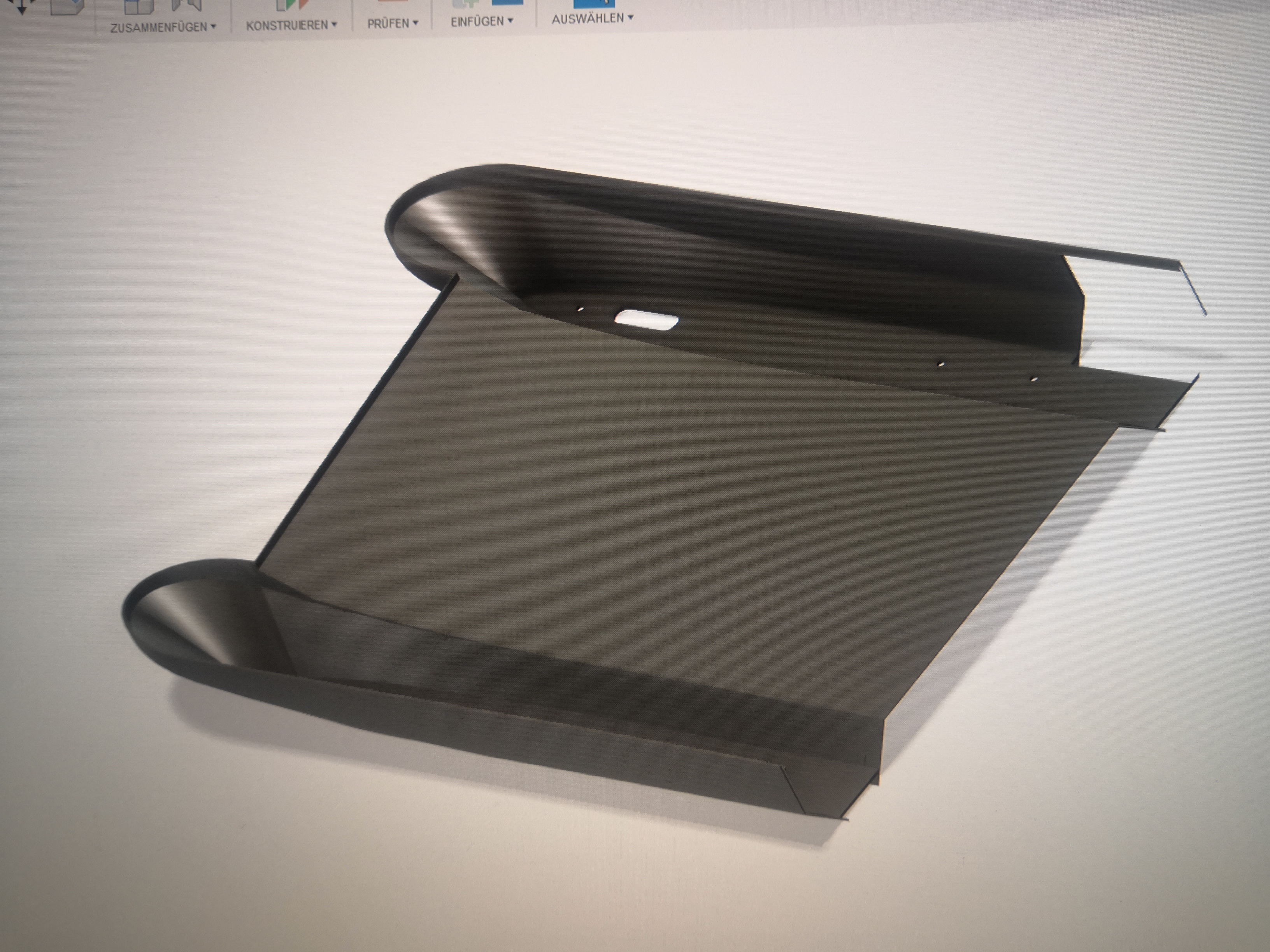
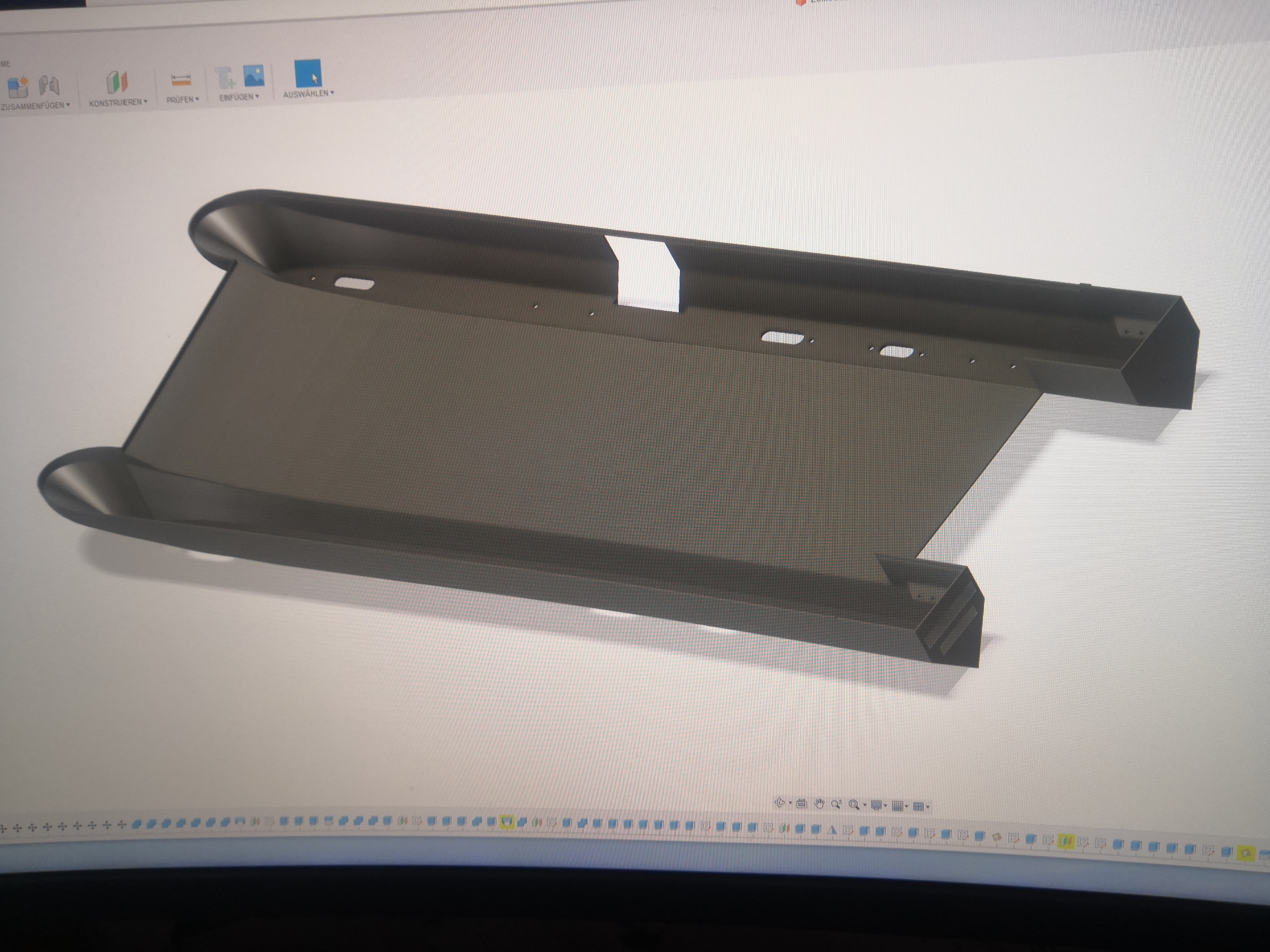
2.
Entwicklung des Modells - Druck der Rumpfplattform im Test
Nachdem
ich ja den Druck der ersten Hecksektion aus dem Drucker geholt hatte,
so stellten sich die ersten Fragen in Bezug auf die Quer- und
Längssteifigkeit der Rumpfplattform dar. Die steifen Profile von
Tauchkörper und Verbinder bringen schon viel Stabilität in
Längsrichtung in das Modell. Jedoch machten mir schon die Quer- und
Schrägkräfte in der Struktur des Modells in der Plattform Gedanken.
Um die Querkräfte aufzufangen habe ich dann weitere Spanten an
passenden Stellen in die Plattform eingebracht, um die Kräfte
aufzufangen und eine weitere Steifigkeit in die Plattform zu bringen.
Der erste Probedruck des recht großen Bugstückes ergab schon eine
höhere Steifigkeit in sich, vor allem durch den nun vorhandene
Querspant mit Durchbrüchen. Was mich aber im Nachhinein wunderte war
eine Biegung im mittleren Stück. Ich hatte mich schon teilweise
gewundert, dass beim Druck an manchen Stellen ein Stringing auftritt,
an anderen Stellen 90° dazu gar nicht. Ich denke, das es an der
ungleichmäßigen Verteilung der Kühlluft liegt, welche dann bei der
Abkühlung des gedruckten Materials zu einigen Spannungen im Material
führt. Die in Längsrichtung verschachtelten Profile sind stabil und
fast gerade, während der Mittelteil sich nach unten ein wenig wölbt.
(Unten in Bezug auf die Fahrtrichtung) Ich drucke in der Ausrichtung
um 45° quer zum Nullpunkt der Druckerplattform. Nach weiterer
genauerer Betrachtung habe ich auch einen Bruch im Gefüge
festgestellt, der sich wahrscheinlich beim Ablösen des Druckes von
dem Federblech gebildet hat. Somit ergibt sich auf jeden Fall die
Notwendigkeit die einzelnen Sektionen durch 3 weitere Spanten in
Längsrichtung zu verstärken, um auch somit eine Verbiegung des
Rumpfunterbodens zu verhindern. Ich habe sogar an eine komplette
Wabenstruktur am Boden gedacht, nicht unbedingt über die ganze Höhe,
aber zumindest, um die mittleren Bereiche steif zu halten. Ich werde
wohl kaum darum herum kommen das ganze auszuprobieren, da ja jegliche
Beispiele im Rahmen der Konstruktion zu diesem Modell fehlen.
3.
Small Waterplane Area Twin Hull
Nicht nur der Artikel im
Forum ist recht interessant, auch dieser Artikel ist lesenswert:
https://de.wikipedia.org/wiki/Small_Waterplane_Area_Twin_Hull.
Nach
dem Studium dieser und anderer Quellen habe ich mich entschlossen
auch dieses sehr wichtige Detail im Rahmen der Fahreigenschaften auch
noch in das Modell umzusetzen, was natürlich eine weiteren
Meilenstein in Bezug auf die Entwicklung des Modells darstellt.
Praktisch bedeute das zwei weitere Module je Schwimmkörper in den
Tauchkörper einzufügen, welche sauber und stabil in die Struktur
eingefügt werden müssen, und natürlich auch dicht sein sollen. Da
der Kreuzer kein Handelsschiff ist und kaum mit wechselnder
Rumpfbelastung zu rechnen ist, so ist die Flossenstabilisierungsanlge
für die reine Fahrfähigkeit und Sicherheit von Nöten. Ich denke,
bei den ersten Testfahrten wird das ganze mal mit und ohne Funktion
ausprobiert.
Und was bedeutet das praktisch?
Auf
der Fregatte des Typs F122 hatten wir auch
Flossenstabilisierungsanlge, die, wenn ich mich soweit erinnern kann,
erst mal eine ganze Menge an Energie gefressen hat, und dazu noch
auch recht oft einfach nicht den Anforderungen gerecht wurde, sprich,
nicht so gut funktionierte und selten eingesetzt wurde. Natürlich
darf man dabei nicht vergessen, dass hier im Original Kräfte im
Bereich von Meganewton gewirkt haben, und eine entsprechende
Hydraulik sehr schnell und auch oft in Aktion treten muss. Dabei
kommt selbst das beste Hydrauliksystem mit seinem Öl zum kochen. In
einem Modell lösen wir diese mit einem Servo, das, den Anforderungen
entsprechend, recht schnell reagieren sollte, und auf die Dauer auch
eine dauerhafte Belastung aushalten muss. Von den Kräften möchte
ich jetzt nicht sprechen, diese sind wahrscheinlich minimal. Ich
schätze es mal so ein, dass diese sich maximal im Bereich des
Auffangens des Eigengewichtes des Modells bewegen. Somit sollte die
Stellkraft der Servos ca. 70 Newton betragen. Aus meiner bisherigen
Erfahrung können auch günstige Servos mit Metallgetriebe durchaus
diese Kräfte aufnehmen. Des weiteren müssen wir uns vor Augen
halten, in welchen Situationen die FloStaBi zum Einsatz kommt. Das
ist zum einen bewegte See, zum anderen harte Ruderlagen, welche ein
Abtauchen des äußeren Schwimmkörpers, bzw. die kritische Krängung
nach Außen, verhindern soll. Wir müssen uns an dieser Stelle
nochmals bewusst sein, dass wir hier ein völlig anderes
Fahrverhalten auf Grund der SWATH Konstruktion haben. Das ist nun
eine ganz andere Welt, und somit auch Fahrverhalten, was die Sache
natürlich weiter interessant macht.
03.02.2024
Es
ergeben sich daraus die folgenden Meilensteine, die in die
Entwicklung des Modells erst mal weiter einfließen müssen:
1.
Die Struktur zur Verstärkung der Plattform über alle Segmente.
2.
Die Konstruktion der 4 Durchbrüche mit Einsetzung der FloStaBi in
die Rümpfe Backbord und Steuerbord.
3. Die Konstruktion zu
Verstärkung der lastabhängigen Poller vom Oberdeck in die
Rumpfkonstruktion.
4. Die Konstruktion des Hauptdecks mit allen
aufsetzenden Details und den Punkten aus Punkt drei.
5. Die
Konstruktion der inneren Abgrenzung für das Aufstecken der weiteren
Aufbauten auf dem Hauptdeck.
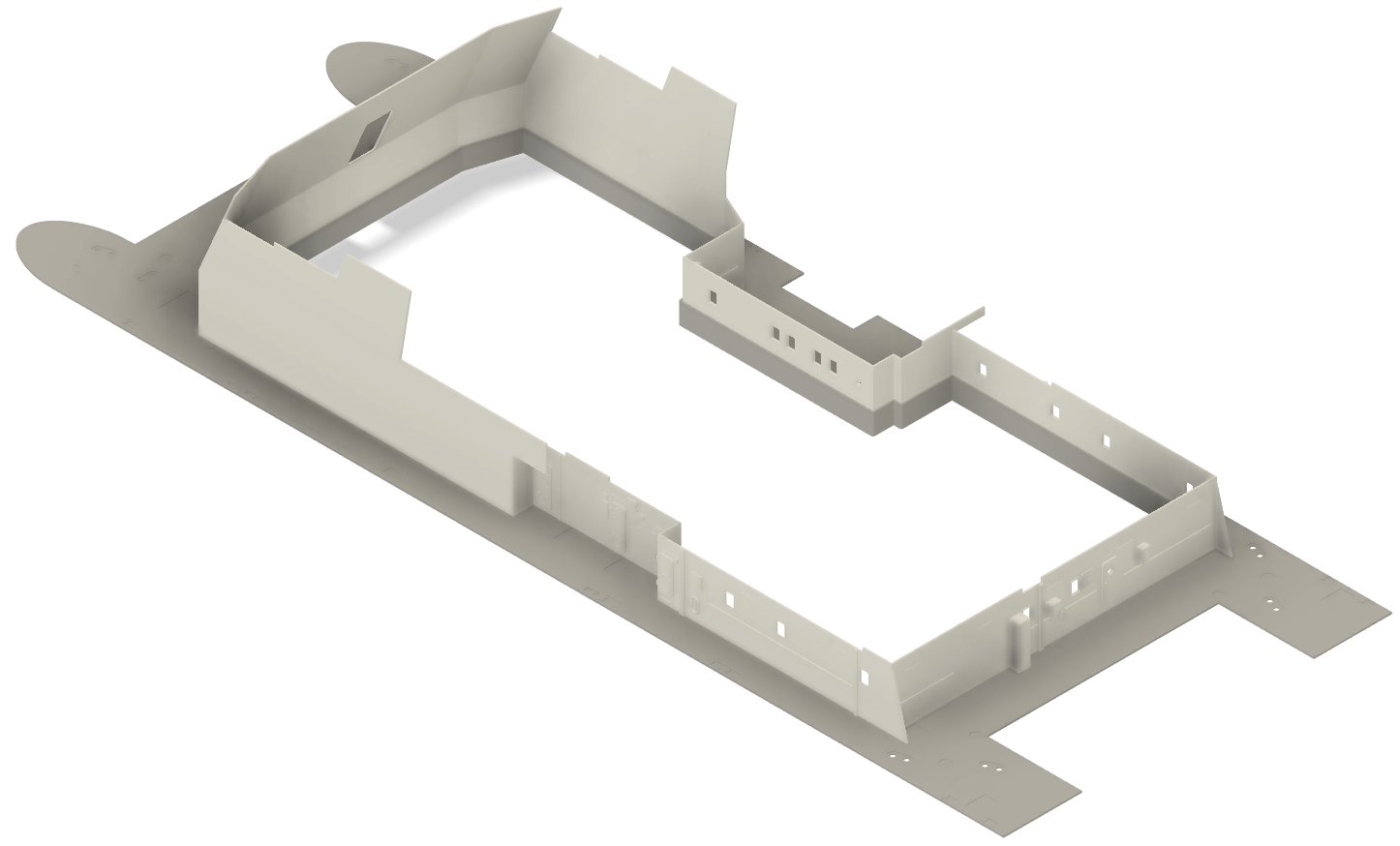
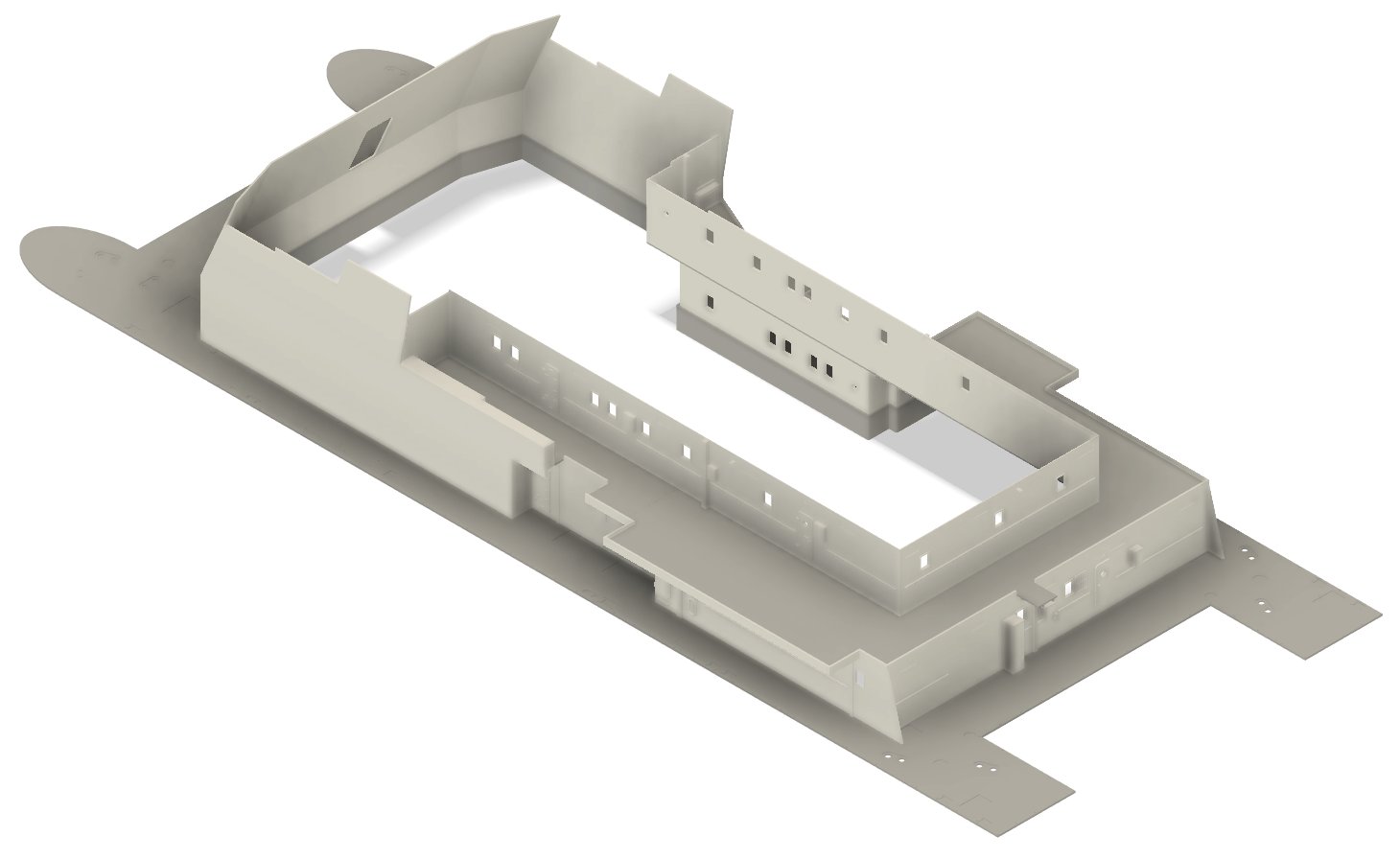
09.02.2024
Die
letzten Tage standen unter dem Zeichen der nachträglichen
Konstruktion der Schwimmplattform des Modells. Aufgrund der
Erfahrungen der Testdrucke habe ich in die Plattform
Längsversteifungen mit Durchbrüchen eingebracht, und zusätzlich
noch einige Querverstrebungen an der Bodenseite eingefügt. Das
sollte nun eigentlich komplett reichen, um die Quersteifigkeit mit
dem auf zu montierenden Oberdeck zu erreichen. Das Oberdeck habe ich
dann auch gleich noch mit konstruiert, mit den entsprechenden
Ausnehmungen, um dort die Lüfter, Poller und andere Anlagen, die
dort später an die richtigen Stellen zu platzieren sind. Bei fast
allen Pollern habe ich mich dazu entschieden eine entsprechende
Verstärkung mit in die Rumpfplattform mit einzubringen. Hier habe
ich mich dazu entschlossen das Gewinde M4 mit dreifacher dicke, also
12 mm tief in den Rumpf mit einfließen zu lassen. Das sollte für
das Anlegen am Steg und für leichte Schleppaktionen reichen. Nachdem
dann das Hauptdeck in der richtigen Höhe platziert war habe ich der
Konstruktion mal ein paar Farbkleckse verpasst, damit man das Gefühl
für die Farbgebung bekommt. Dazu habe ich dann noch den Rest der
Scheuerleistenhalterung an das Modell gebracht, was am Bug an der
Rundung vorne außen noch fehlte. Ich habe gerade gesehen, dass da
noch Klebeverstärkung am Ende des Druckes nach oben fehlen. Auch
sollte ich noch einige Fasen oder Schrägen unter die Versteifungen
bringen um dort die Bruchgefahr zu minimieren.
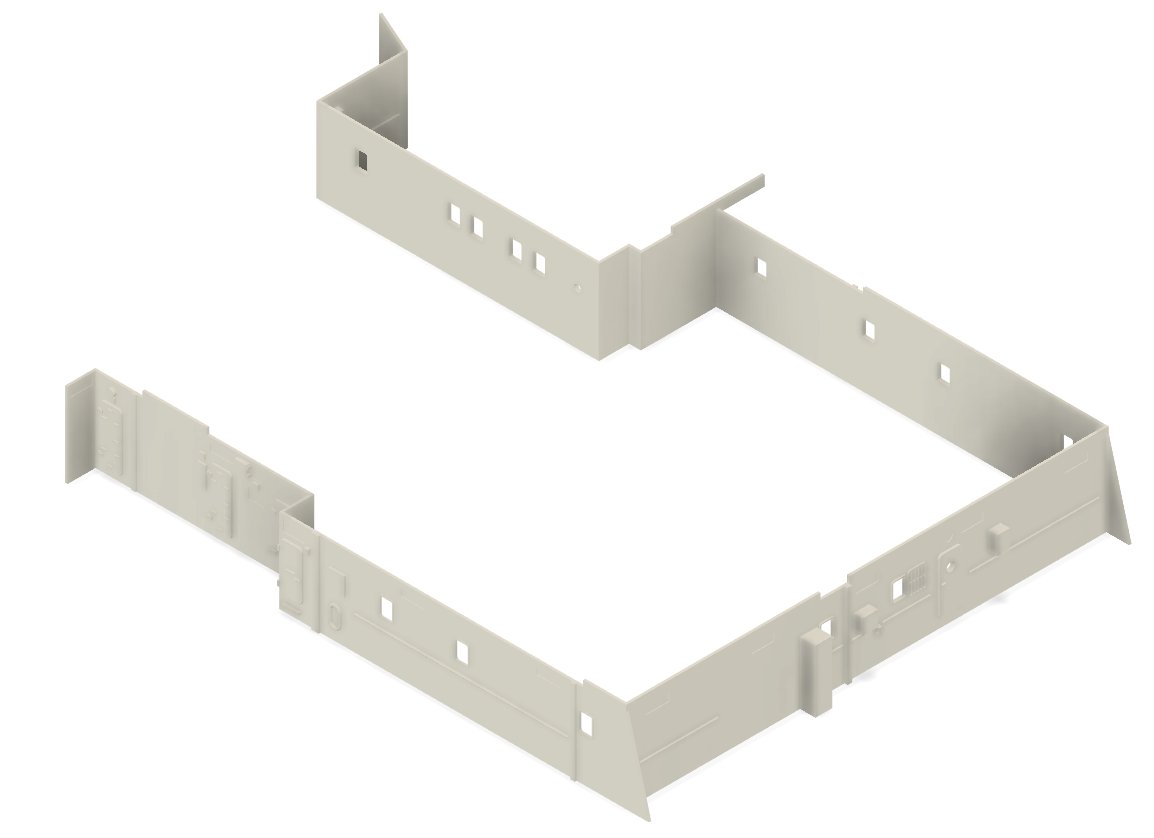
Gestern
wurden noch die je 3 Elemente der Verbinder zusammen geklebt, unter
Verwendung des extra dafür ausgesuchten Cyancrylatklebers. Wie
versprochen war die Verklebung Minuten später Bombenfest. Auf dem
Bild fehlen im Moment noch die Schwimmkörper, welche konstruktiv
wegen der FloStaBi und den beiden BSRs und dem noch nicht
durchkonstruierten Antrieb fehlen. Eingesteckt sind die vorhandenen
Testdrucke. Heute habe ich mich dann mit den Muttern zum Einschmelzen
beschäftigt, und ich muss sagen, hier ist absolute Präzision
gefragt, bei einigen Muttern stellte ich fest, dass es hin und wieder
eine Neigung zum abdriften gab. Okay, ich gebe zu, habe es freihändig
gemacht, und das Ergebnis war nicht sonderlich gut oder perfekt.
Einige Messingmuttern mussten nochmals in dem gedruckten Körper
etwas bewegt und ausgerichtet werden. Um das BSR danach passend
auszurichten und in Funktion zu bringen habe ich Stunden gebraucht,
lag aber auch daran, dass ich Stellenweise das Spiel etwas verändert
habe. Der Halt der Muttern im gedruckten Material steht außer
Zweifel, wichtig ist nur, dass die Dinger am besten 100% ausgerichtet
sind und Lotrecht und tief genug in den gedruckten Körper
eingebracht werden. Auch ist zu beachten, dass bestmöglich kein
Sackloch verwendet wird, da das geschmolzene Material gerne in das
Gewinde zurückfließt. Hier sollte man bei der Konstruktion
entsprechender Teile für etwas Luft und Spiel für das Einschmelzen
denken.
20.02.2024
Nun
denn, der Druck der verstärkten Version des Überwasserrumpfes ist
im Gange, und ich habe eben die Module Backbord und Steuerbord 1 mit
den Modulen 2 und 3 zusammen geklebt. Trotz der Verstärkung um die
Verwindung und Warping zu verhindern zeigen sich doch leichte
Verformungen im Zehntelbereich, was die Verklebung nicht einfacher
macht. So musste ich doch an der Verbindung von Modul 2 zu 3 etwas
Material wegschleifen, damit ich eine durchgehend flächige
Verklebung sicher stellen konnte. Parallel dazu habe ich dann mal
zwischendurch die aktiven Poller für Schleppen und vertäuen
konstruiert, und bin derzeit dabei die Aufbauten Nachzukonstruieren.
Hier ist als Hindernis die teilweise verschachtelte Bauweise ein
Hindernis, was eine logische Umsetzung auf die Druckfähigkeit und
Montage erfordert. Ich möchte Versuchen die vorhanden Flächen
möglichst in einem Stück zu drucken, und die Decks dazwischen
bestmöglich passend einzufügen, ohne groß die Struktur des Aufbaus
in Frage zu stellen. Na ja, Baustellen gibt es genug, und ich werde
versuchen die verbleibenden 8 Tage bis zu meinem neuen Job
bestmöglich zu nutzen und die Entwicklung des Modells weiter nach
vorne zu treiben.
Da ich ja immer noch ein parr
Fragezeichen in Bezug auf das Original habe, so habe ich den Zoll in
Cuxhaven kontaktiert, der mich dann an den zuständigen Mitarbeiter
der Einsatzflotte verwiesen hat. In den kommenden Wochen ist eine
Besichtigung eines der beiden Schiffe leider nicht möglich. Die
Helgoland geht kurzfristig nach Emden in die Werft, was für die
Borkum zusätzliche Einsätze in der Nordsee bedeutet. Mir wurde aber
ein Ansprechpartner für die technischen Belange der Schiffe genannt,
der ggf. auch Pläne zu den Schiffen zur Verfügung hat. Ich bin von
der Zollbehörde soweit echt begeistert, als dass diese die Anfragen
seitens uns Modellbauer mit wohl wollen aufnimmt und auch bestmöglich
unterstützt. Gut so was zu wissen. Entsprechende Kontaktadressen und
Ansprechpartner können bei mir nachgefragt werden.
Da
ich mir im Moment doch einige Gedanken über die Zukunft und das
Wohlergehen des Vereins mache, so bitte ich zu entschuldigen, dass
ich mich hier im Moment nicht ganz so sehr zu dem Projekt ausschütte,
wie bisher gewohnt. Momentan ist es ein guter Flow, dem ich mich da
hingebe. Der wird aber sicherlich mit dem kommenden Monat etwas
flacher werden, da ich ja einen neuen Job antrete, wobei mir mein
linkes Knie auch noch etwas Sorgen macht. Dazu bei kommender
Gelegenheit mehr am Kanal. Nee, nicht zu dem Knie, das andere Thema
ist gemeint.
Ich habe mir, aufgrund der letzten
Erkenntnisse nochmal Gedanken zur Gestaltung der Schwimmkörper
gemacht. Derzeit sehe ich die Gestaltung der Schwimmkörper
grundsätzlich kritisch. Ein Schwimmkörper soll ja nun aus der
Antriebseinheit, zwei Systeme FloStaBi, dem BSR und de Energieeinheit
bestehen. Bisher dachte ich an eine durchgehende Konstruktion des
Schwimmkörpers, mit je Einheit zusätzlich verbauten Wassermeldern.
Grundsätzlich nicht verkehrt, aber nach reiflicher Überlegung denke
ich wird es besser sein, jede Einheit in sich Wassertechnisch in sich
abzuschotten. Konstruktiv ist das kein Problem. Es werden einfach
gerade Flächen gegen einander verbunden. Mechanisch wird das ganze
eh durch Schrauben von oben aus dem Oberen Rumpfkörper durch die
Verbinder hinunter in die Schwimmkörper fixiert. Diese neue
Aufteilung dient der reinen Sicherheit, um die Schwimmkörper an sich
auch Schwimmfähig zu halten.
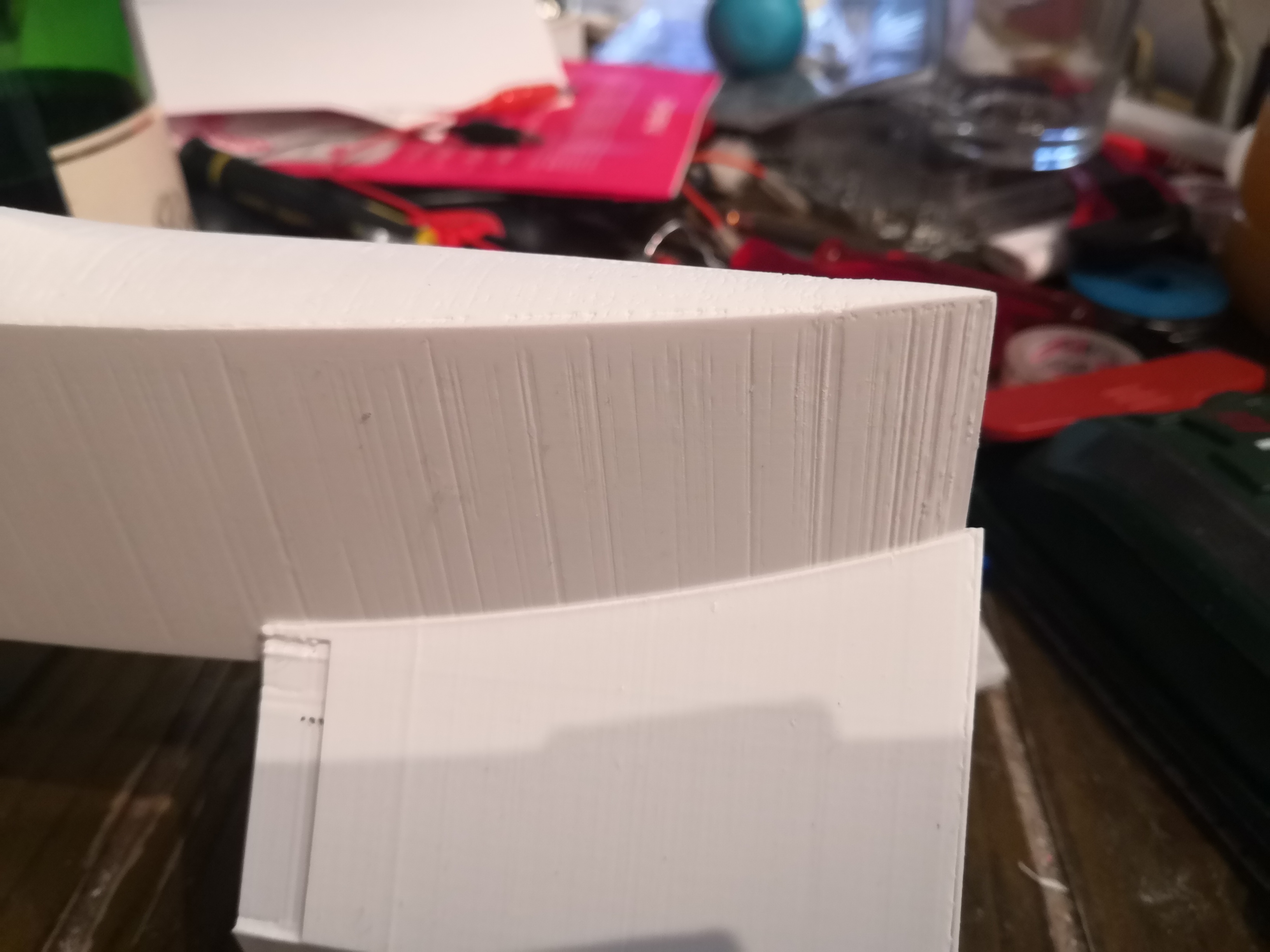
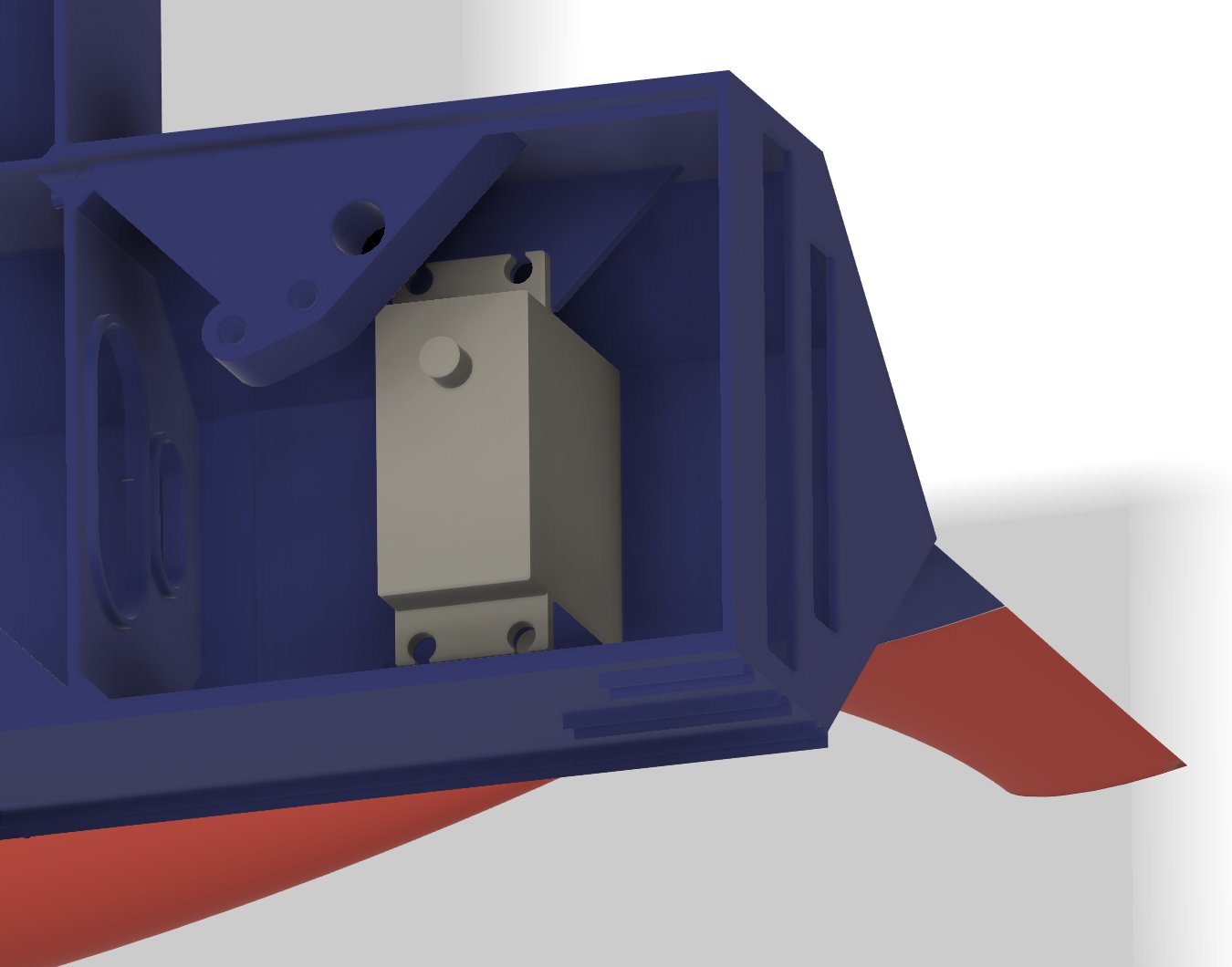
21.02.2024
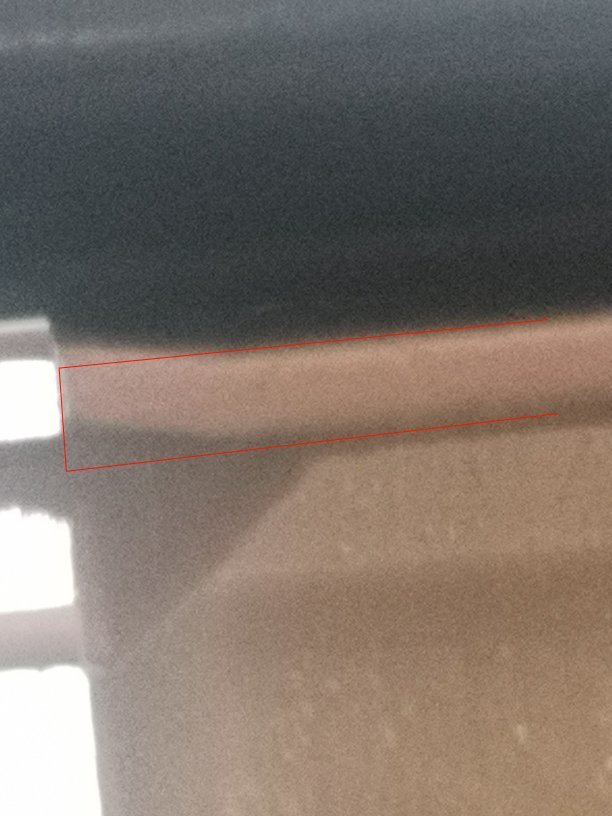
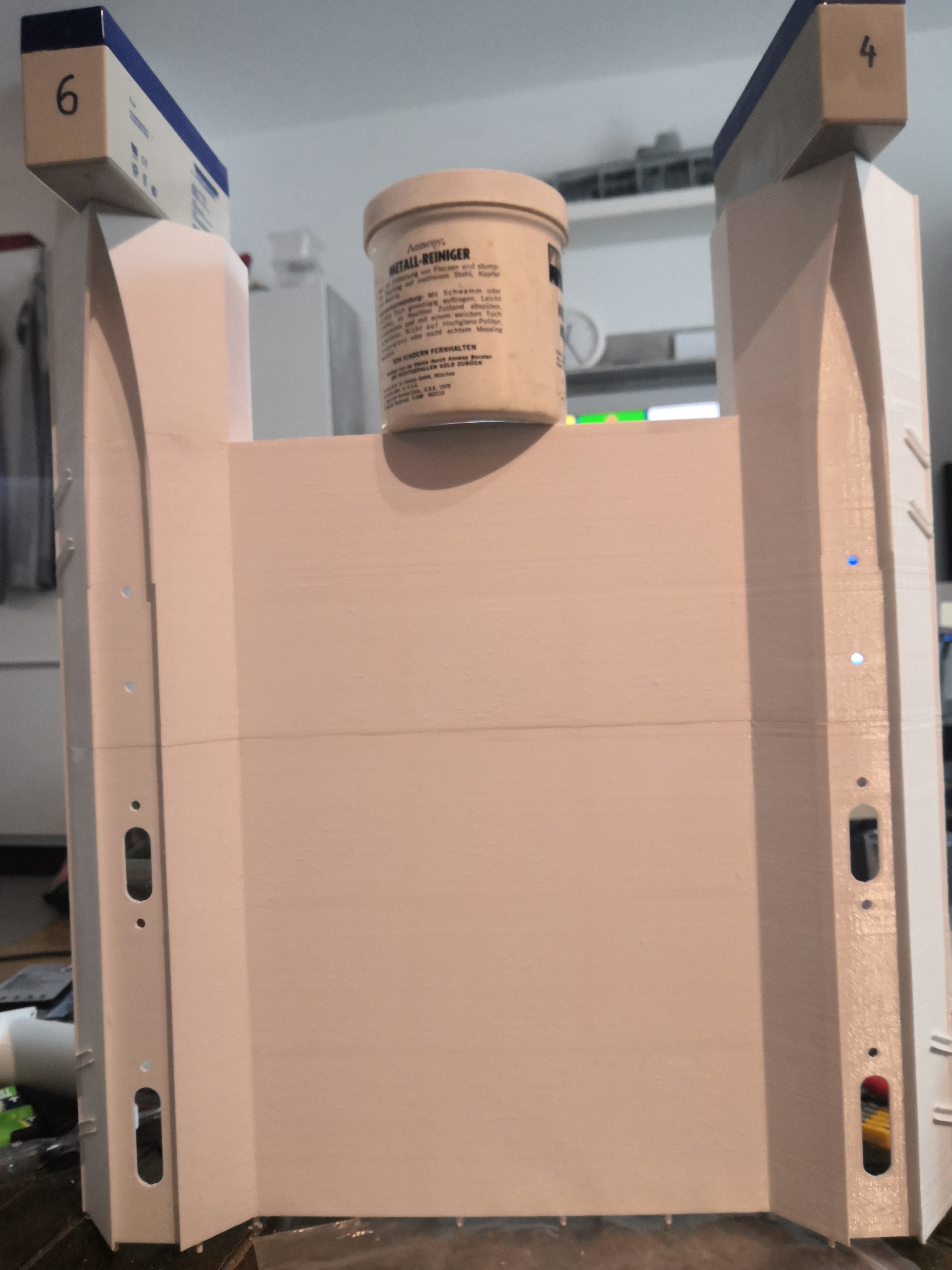
Heute
Morgen habe ich das Modul 4 des Überwasserrumpfes aus dem Drucker
geholt. Der Druck war soweit in Ordnung, bis auf 2 Besonderheiten.
Auf der Steuerbordseite hat sich der Druck ein wenig im Bereich der
Verstärkung nach außen gebogen, siehe Foto. Laut der Konstruktion
liegt dort ausgerechnet eine Rumpfverstärkung, die für eine Poller
auf der Steuerbordseite vorgesehen ist. Ich werde da wohl mechanisch
etwas eingreifen und Nacharbeiten müssen. Des weiteren habe ich wie
bei dem Modul 3 festgestellt, dass sich trotz großer Auflagefläche
und 3 mm umlaufenden Brim eine leicht konvexe Durchbiegung zu
erkennen ist. Wie auch bei dem Modul 3 werde ich diese Vorsichtig
wegschleifen und begradigen, damit ich keine größeren Spannungen in
den Bodenbereich mit einbringe. Die Durchbiegung beträgt so ca.
0,5mm. Auf jeden Fall werde ich die Fläche soweit plan schleifen,
damit ich die Module bestmöglich verkleben kann. Das Modul 4 hat auf
der Steuerbordseite ja zusätzlich noch die Ausnehmung für den
"Aufzug", um dort Personal auf andere Schiffe zu
verbringen. Die Ausnehmung hatte ich schon vor Wochen gedruckt, und
heute dann dort eingepasst und mit Cyancrylat-Kleber vorsichtig
eingeklebt. Die Klebestellen zeigen eine recht gute
Verlaufsverklebung und weisen auch nach der mechanischen Bearbeitung
eine wirkliche hohe Festigkeit auf. Bis jetzt hat sich die
Investition für den Kleber auf jeden Fall gelohnt.
Ich
habe dann den Druck von Modul 5 gestartet. Bei der Reinigung der
Oberfläche viel mir dann eine Stelle der PEI-Beschichtung auf, die
sich auf einem Ø von ca. 4mm von dem Federblech leicht ablöste,
eine Art Blasenbildung. Ist erst mal nicht so schlimm, aber eben ein
Hinweis darauf, dass auch diese Beschichtung halt nicht ewig hält.
Ein neues Blech steht allerdings noch für den weiteren Betrieb
bereit. Die blödeste Arbeit nach dem Druck ist, dass Stützmaterial
von dem eigentlichen Körper zu entfernen. Ohne das wäre der Druck
fast unmöglich. Auch die kleinen Fäden durch das leichte Stringing
werden dabei entfernt und bestmöglich glatt geschliffen. Hier mal
ein Foto von dem gesammelten Stützmaterialschrott. Laut Slicer
wurden mit Stützmaterial für Modul 4 mit dem Teil der Ausnehmung
338 Gramm an Filament angegeben. Nachdem ich die o. g. Arbeiten
durchgeführt habe wog das Teil mit eingeklebter Ausnehmung 256
Gramm. Somit sind grob 8,7% des gedruckten Materials für die Tonne.
Ich gbe zu, manchmal schaue neidisch ich auf die tollen Ergebnisse
von den Druckern der neuen Generation. Meine Oberflächen sind da
schon nicht schlecht, die der neuen Drucker übertreffen diese aber
bei weitem. Auf der anderen Seite gibt es wenige bezahlbare Drucker
in der Druckgröße 400 x 400 mm oder mehr, die ich hier benötige.
Darum habe ich mir auch den Anycubic Kobra Max angeschafft. Ein
Anycubic Chiron steht hier noch als defekt herum, und ein zweiter
wartet in der Bastelkammer auf den nächsten Einsatz. Dort aber erst
wenn ich da meine Regale auf die Reihe habe, was ich aber erst nach
meinem Knieproblem machen werde. Ich gehe aber derzeit davon aus, das
der Chiron nicht mal Ansatzweise an die Druckqualität des Kobra Max
herankommt, und sicher mehr Nacharbeit der dort gedruckten Teile
erfordert. Abgesehen davon habe ich bis heute noch kein Teil
gespachtelt oder gefillert. Das werde ich erst machen wenn alle Teile
des gesamten Rumpfes fertig gedruckt sind, und wird dann auch in
meine Bastelkammer stattfinden.
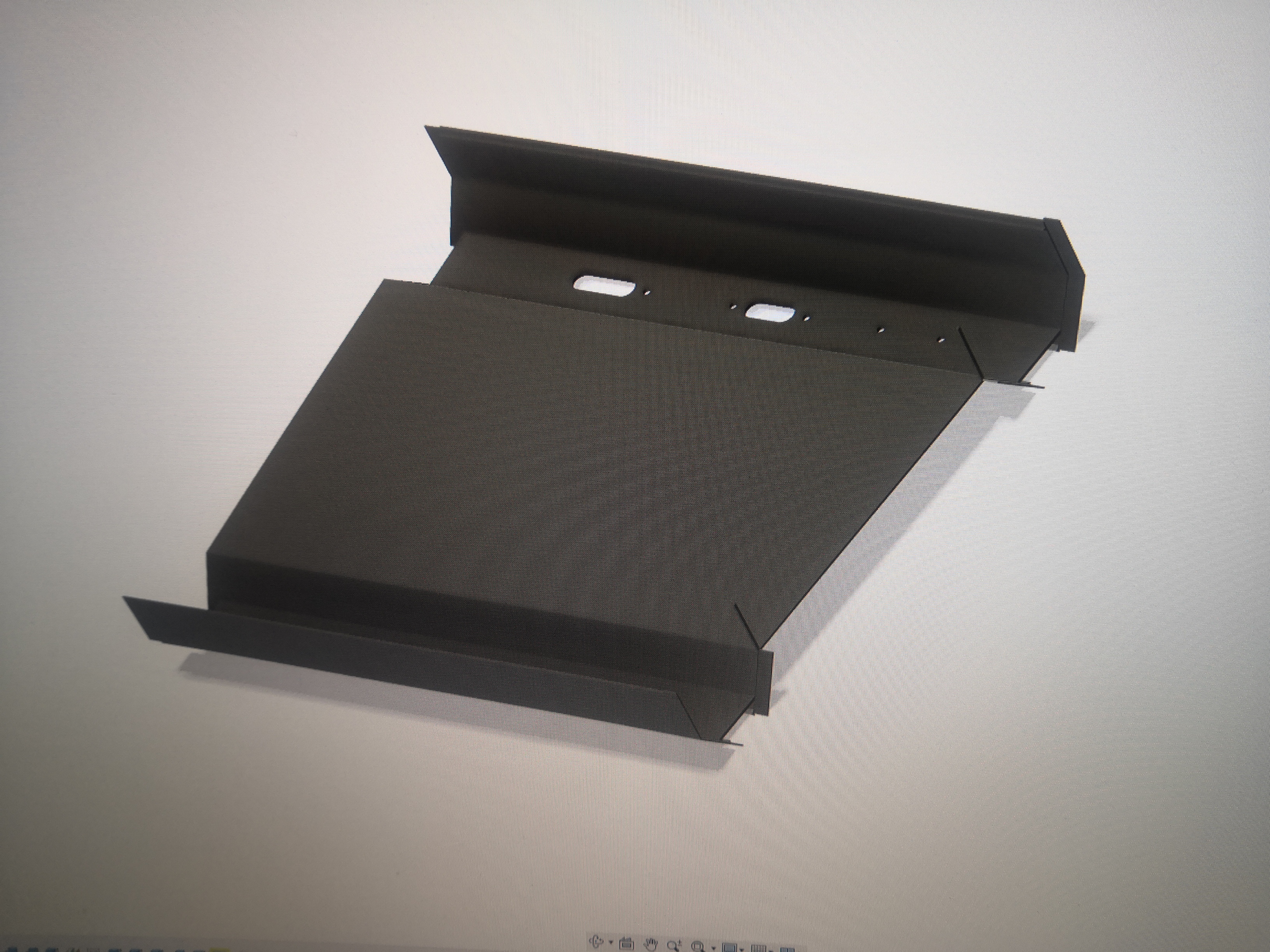
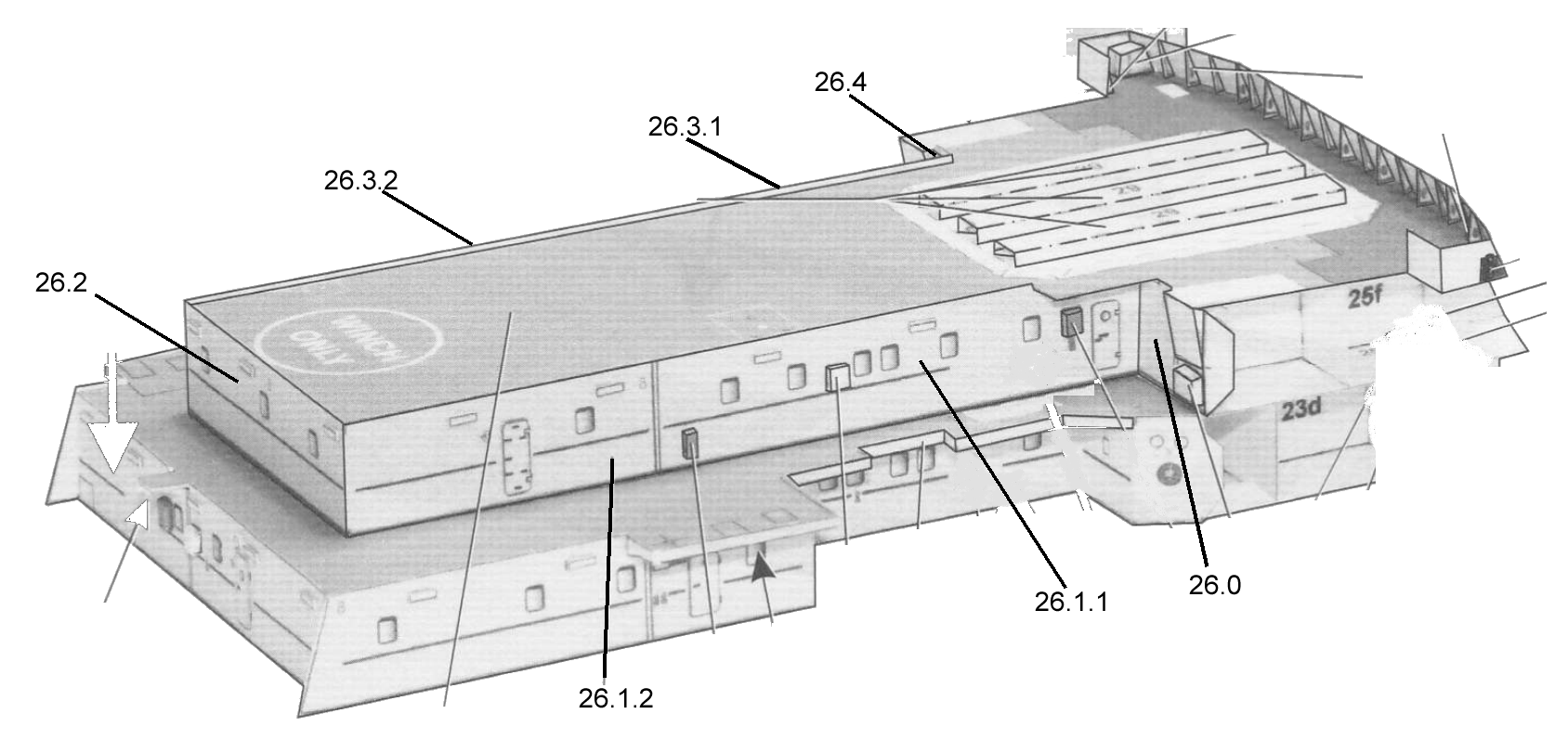
Auf jeden Fall ist es den
nun verstärkten Modulen schon anzusehen, und bei den
Verwendungstests auch zu spüren, dass nun eine gewisse Steifigkeit
im oberen Rumpfaufbau zu verzeichnen ist, der sich durch das dann
später noch aufgesetzte und über die Poller verschraubte Hauptdeck
noch weiter verstärkt. Zur Erklärung. Die Löcher sind für die
Verschraubung der einzelnen Elemente unter einander vorgesehen, die
Langlöcher für die Durchführung der Kabel und Servolitze, der
vorgesehenen Wassermelder, egal auf welcher Basis, sowie für ggf.
notwendige Absaugung von Wasser aus den Schwimmkörpern, falls mal
doch Wasser eindringen sollte. In den beiden Heckmodulen ist die
Halterung der Verschraubung der Futaba Servos zu sehen, die auf die
Ruder wirken werden. Das passende Kugelkopfgestänge muss ich mir
noch besorgen, ist derzeit nicht vorhanden.
22.02.2024
Nun
so kann es dann passieren. Ich habe heute das Modul 5 vom Drucker
geholt. Nach ablösen des Teils vom Federblech viel mir auf, dass ich
an der Basis einen Versatz in Y-Richtung hatte, was darauf schließen
lässt, das ein oder beide Zahnriemen zwischendurch über das
Zahnriemenrad gesprungen sind. Der Kobra Max hat 2 Riemen für den
Tisch in Y-Richtung. Die eine Spannrolle war recht gut gespannt, die
zweite rechte nicht so besonders. Bei dem Versuch dort nachzuspannen
stellte ich fest, dass das nicht so richtig möglich war. Somit habe
ich zunächst den Drucker dort zu reparieren und die Spannrolle zu
demontieren und das Problem zu beseitigen.
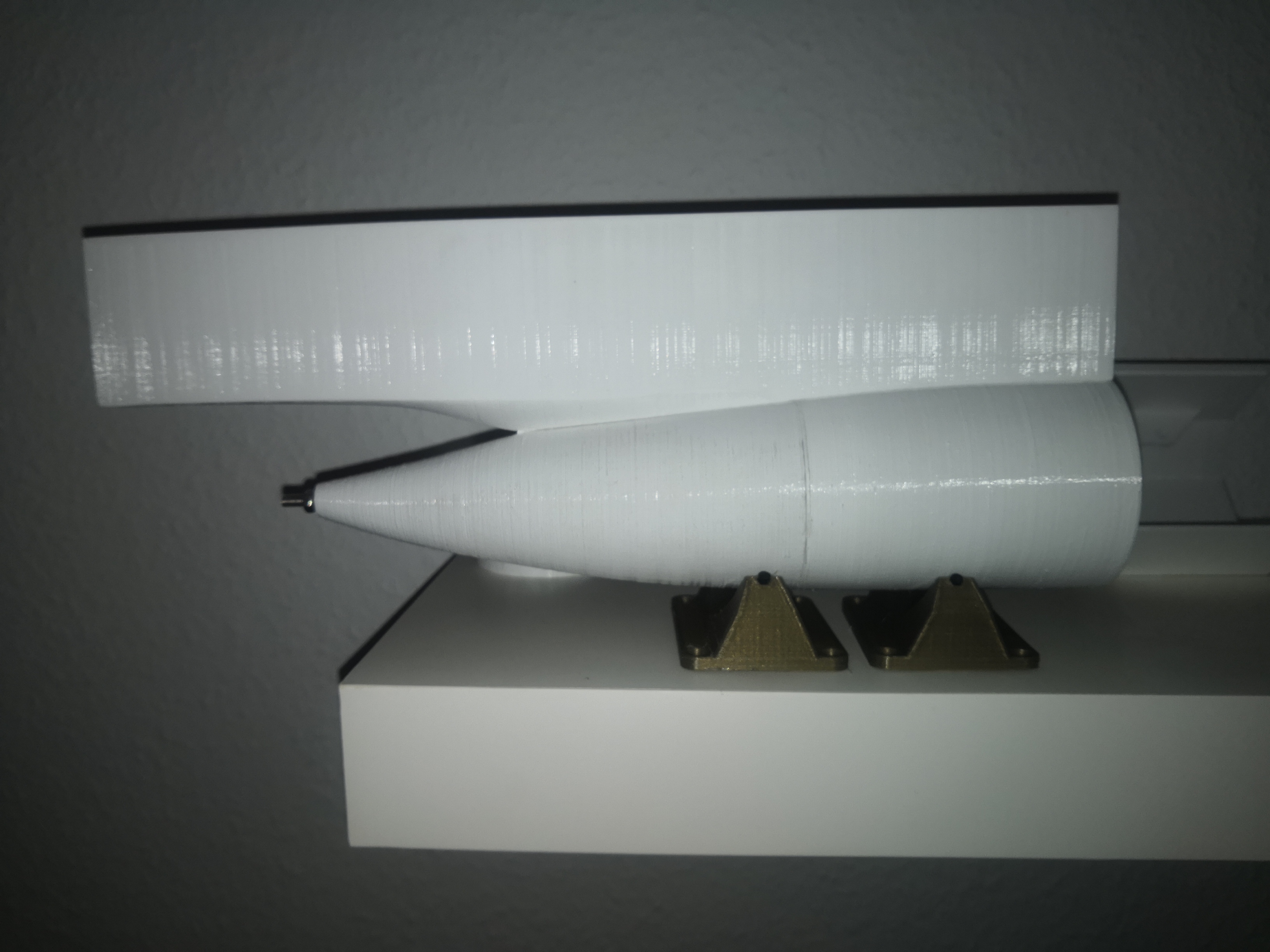
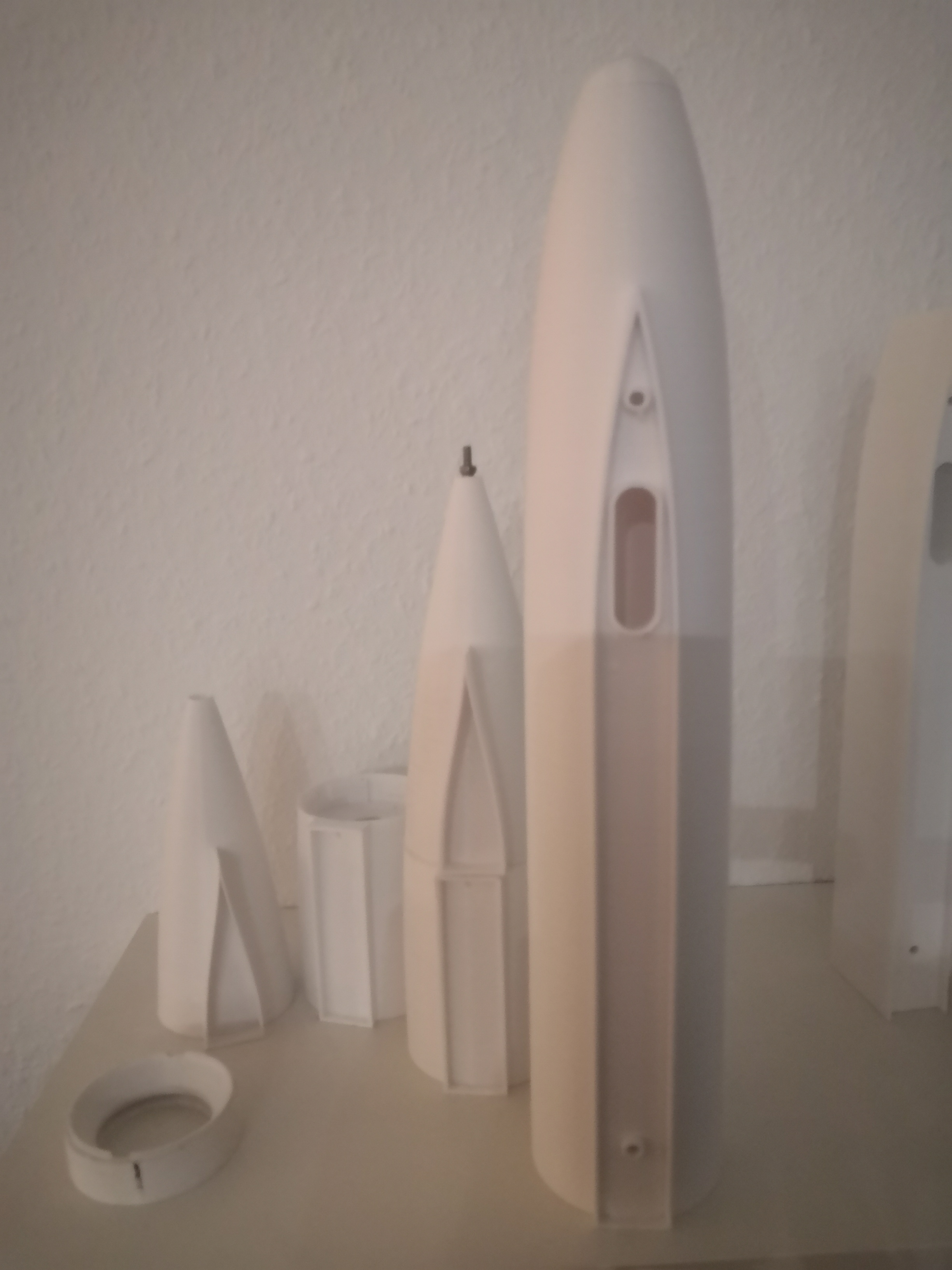
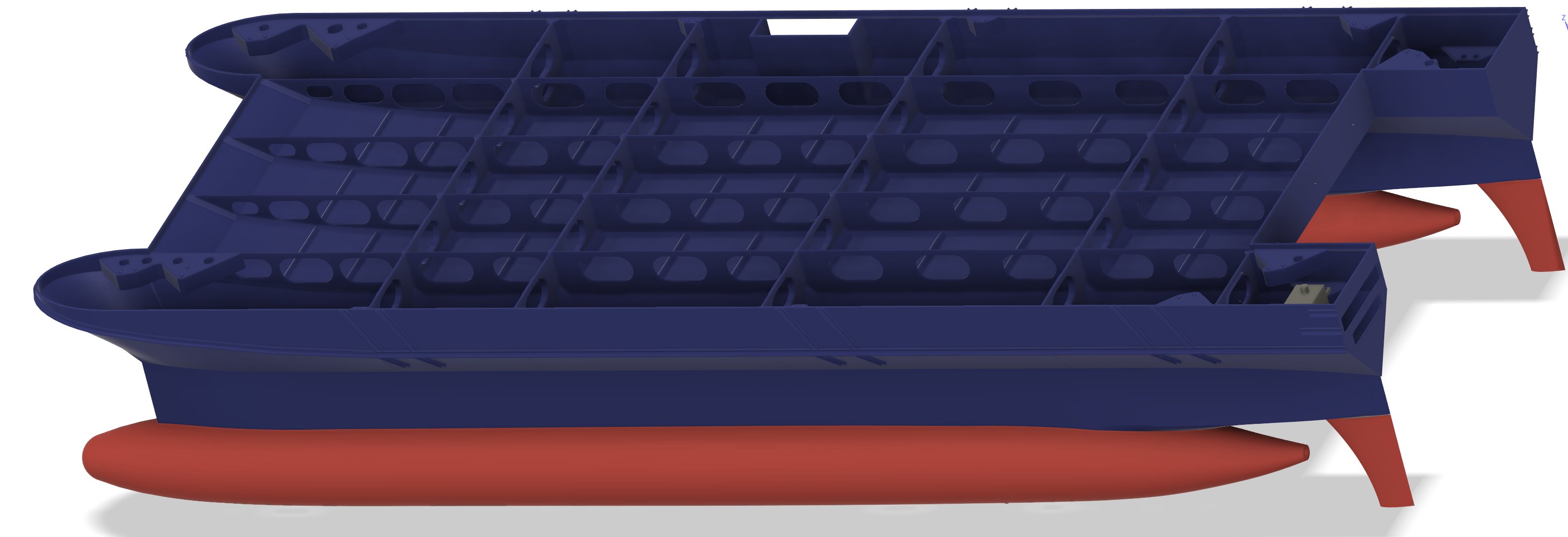
24.02.2024
Gegen
11:30 war der Druck des letzten Moduls dann auch fertig, und wurde
dann noch schnell von der Stützkonstruktion befreit und sauber
gemacht. Um den Rumpf dann mal vorzustellen habe ich die Module mit
den Verbinder etwas verschraubt und die Testdrucke der "Torpedos"
einfach drunter gesteckt. So wurde das Stück dann am Samstag im
Vereinsheim vorgestellt.
26.02.2024
Nachdem
dann nun das Hauptdeck mit den Ausnehmungen der Maschinen und den
Löchern für die Reling soweit fertig gestellt wurde, so landete
gestern der erste Testdruck vom Hauptdeck hinten auf dem Drucker. Den
habe ich dann aber nach der dritten Schicht abgebrochen, da das
Filament an den Ecken nicht auf dem Federblech blieb, und haltlos von
der Düse durch die Gegend geschoben wurde. Also erst mal wieder den
gedruckten Mist runter und die ganzen Kanten nochmals mit Isopropanol
reinigen. Habe dann erst mal die Mittelstücke Backbord und
Steuerbord gedruckt, und das heute Morgen begutachtet. Dabei tauchte
ein Fehler bei der Aufteilung aus dem Bauplan auf. Die Halterung der
Stelling auf Backbordseite war verschoben und ging komplett durch die
Reeling. Also das ganze mal eben passend ändern. Des weiteren war
der Druck doch etwas dünn, gemessen 0,95 mm. Das habe ich dann doch
noch auf 1,6mm verstärkt. Des weiteren bin ich am überlegen, ob ich
das ganze evtl. verkehrt herum auf dem Federblech für PLA drucke, um
die Oberflächenstruktur davon mitzunehmen, was sicher erheblich
besser aussehen könnte. Muss ich mal testen.
27.02.2024
Heute
Morgen bekam ich die Info, dass mein Grafiktreiber mal wieder eine
Aktualisierung nötig hätte. Ich habe mir dann für meine
Grafikkarte die beiden möglichen Treiber für meine RADEON RX 850
heruntergeladen, und mich das erste mal für den speziellen
CAD-Treiber entschieden
(amd-software-pro-edition-22.q4-win10-win11-nov15.exe), da ich im
Moment kaum Spiele auf dem Rechner habe. Wie ich das schon kannte
mussten auch der Treiber für den Monitor anschließend neu
installiert werden, und nach 15 Minuten und drei Neustarts war dann
das System wieder so, wie gewohnt da. Fast. Nach dem dritten Start
hat sich das System dann die Einstellungen selbst gesucht, und ich
hatte das Gefühl noch nie so ein scharfes Bild und feine Linien auf
dem Bildschirm zu haben. Die Bildschärfe ist wirklich genial, und
nachdem ich dann Fusion 360 neu gestartet hatte, fand ich, dass auch
das Arbeiten mit Fusion um einige Prozentpunkte schneller war. Falls
jemand das auch mal versuchen möchte, ich kann die PRO oder CAD
Version nur empfehlen.
Da ich gerade dabei bin die
Aufbauten zu konstruieren und auch zu schauen welche Teile da in FDM-
oder SLA - Technik gedruckt werden sollen, so bin ich auch über die
Logos vom Kreuzer gestolpert, und habe mir diese weitestgehend aus
dem Internet runter geladen. Wie ich diese dann aufbringe weiß ich
noch nicht, sind aber auf jeden Fall besser, als die verpixelte
Version aus der Vergrößerung. Auch zum Thema Farbgebung werde ich
mich noch mal schlau machen müssen, damit das auch passt, nicht nur
technisch wegen Schlagzähigkeit, sondern auch wegen der Farbgebung
in Sachen RAL.
07.03.2024
Ich hatte ja die
Absicht eine elektrische Zahnbürste für Schleifarbeiten umzubauen.
Vorhanden war eine von Lidl vertriebene Version, an der ich dann mal
die Borsten entfernen wollte und auch getan habe. Der Erfolg dabei
war, dass ich die Mechanik in der Bürste wohl leicht zerstört habe,
und die Schwingfunktion nicht mehr gegeben war. Ersatz war nicht
vorhanden, und mir für 6,90 EUR eine neuen Satz zu kaufen (bei
gleichem negativem Erfolg) plus Frachtkosten fand ich nicht so gut.
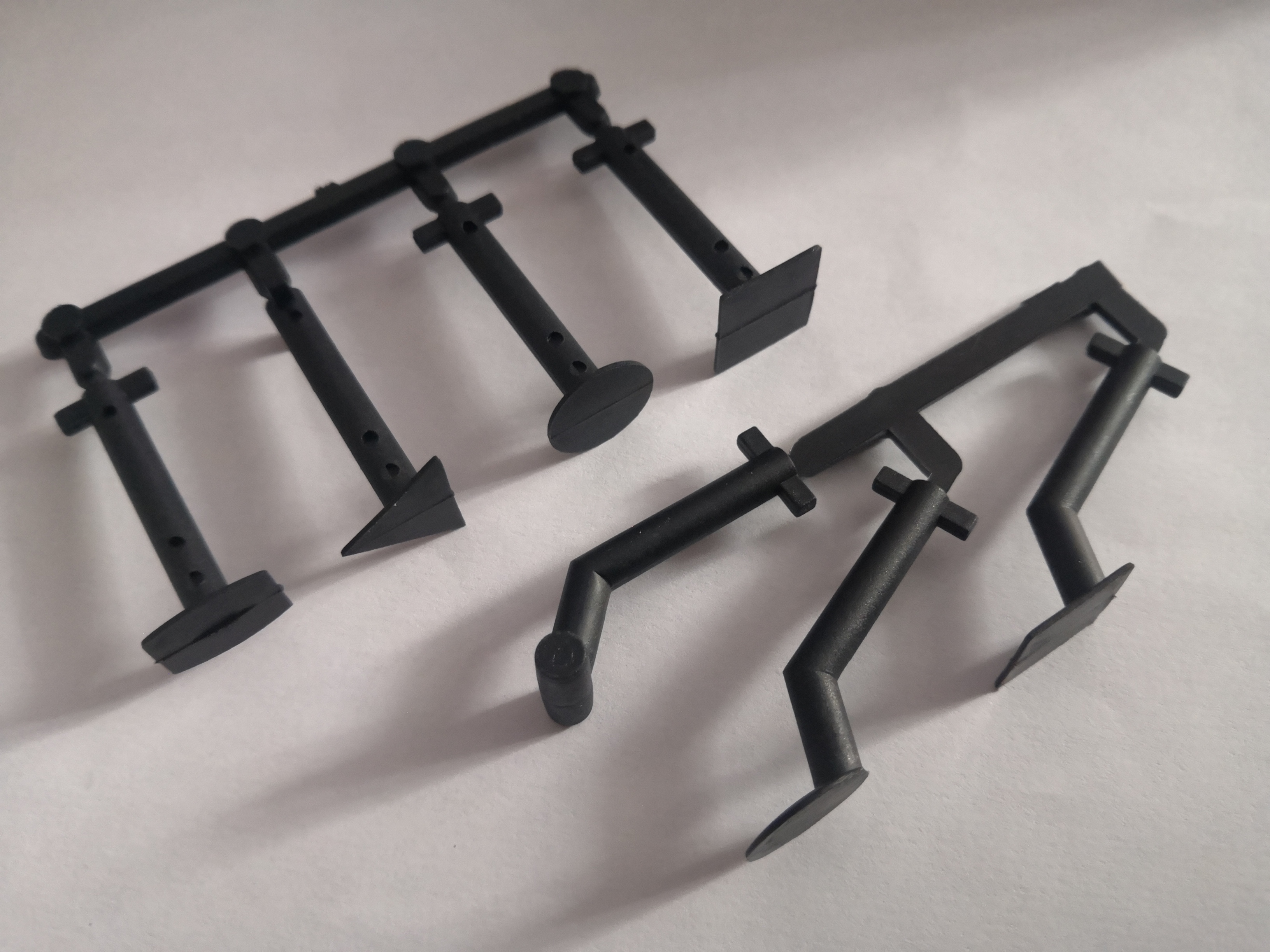
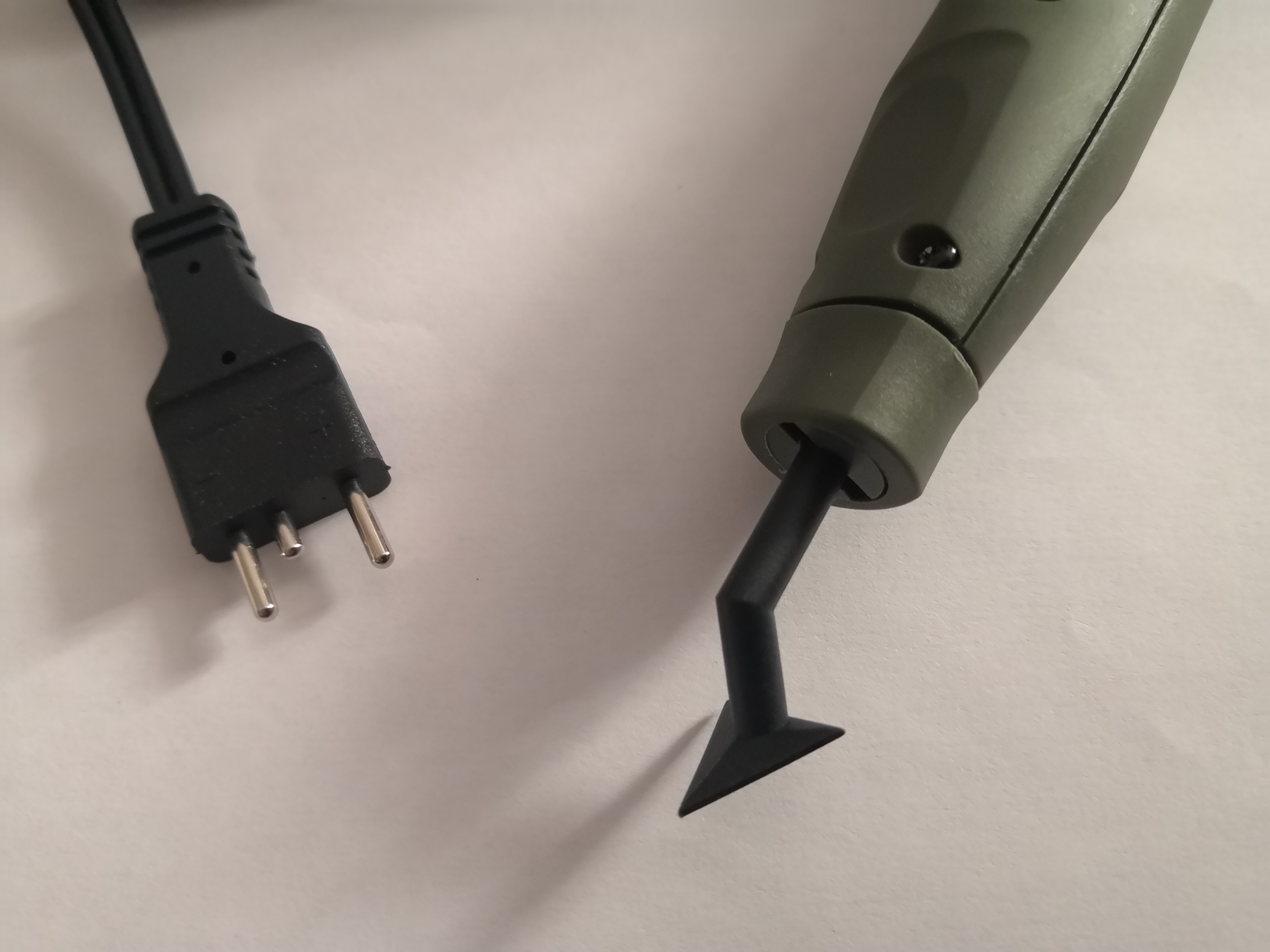
So habe ich mich dann noch weiter umgeschaut und mich für den PS 13
von Proxxon entschieden, den ich am günstigsten bei Reichelt
gefunden habe, und auch gleich geordert. Nach dem eintreffen der Ware
habe ich mal den ersten Test gemacht. Der Hub des Schlittens ist mit
ca. 2,5 mm recht heftig, und leider lässt sich die Geschwindigkeit
auch nicht regulieren. ABER. Rein von der Aufnahme und der Mechanik
bietet diese Ausführung auch für spezielle Fälle durchaus die
Möglichkeit sich spezielle Werkzeughalter selbst zu fertigen. Die
mitgelieferten Werkzeuge sind im Spritzgussverfahren in Kunststoff
ausgeführt. Um sich selbst spezielle Schleifkörperträger zu
fertigen besteht zum einen die Möglichkeit über 3D-Druck zu
fertigen, wo ich aber bei der mechanischen Festigkeit doch einige
Zweifel habe. Was aber auf jeden Fall gehen sollte, wären
entsprechende Werkzeuge aus Messing- Rohr - Blech und Vollmaterial zu
fertigen, die dann auf jeden Fall lange halten und funktionieren. Ich
werde mal die Details in einer Zeichnung zum besten geben. Für uns
Modellbauer sind mit Sicherheit eher die schräg gestellten Werkzeuge
interessant. Die dann mit einem Vielzahn zu der Klettoberfläche
bestückt ermöglichen dann sogar recht spezielle Formen, und auch
Winkel für ganz spezielle Anwendungen. Werde ich mit Sicherheit
ausprobieren. Reiner Zufall war, das der Standard Stecker von Proxxon
auch zu einer von PARKSIDE vertrieben Schleifeinheit mit Netzteil
passte, stand gerade daneben. Daraus ergibt sich die bestätigte
Annahme, das PARKSIDE (von Lidl) ein gewisses Kontingent günstig bei
gewissen Markenherstellern einkauft, und unter eigenem Label
vertreibt. Hier mal ein paar Bilder dazu.
Da
ich das fast fertige Rumpfmodul oberhalb der Wasserlinie vergangenes
Wochenende im Club vorgestellt habe, hier zur Vollständigkeit noch
die Bilder dazu. Einige kleine Nacharbeiten sind noch von Nöten,
aber das Ergebnis mit den montierten Verbindern spricht doch schon
für sich. Ich denke, ich werde das kommende Wochenende mal
konstruktiv daheim verbringen, um die letzten Konstruktionen für die
FloStaBi fertig zu stellen und die neue Abdichtung mit den neuen
O-Ringen 58x2 mm fertig zu stellen, um dann bald endlich die
komplette Unterwassersektion fertig zu stellen, und dann auch bald
mal im Wasser zu testen. By the Way werde ich doch wohl beide
Antriebsarten in die Konstruktion mit einfließen lasen, sprich 1.
Brushless und 2. Brushed. Da die von mir gekauften Brushless Motoren
mit 2300kV erheblich aufdrehen werden, ich aber noch nicht die
Möglichkeit habe diese Drehzahlen mittels Mischer runter zu regeln,
so werde ich Test halber auch die zweite brushed Version vorsehen. Es
ist ein Test, ein neues Modell, selten so gesehen, ud von der Art
eben besonders.
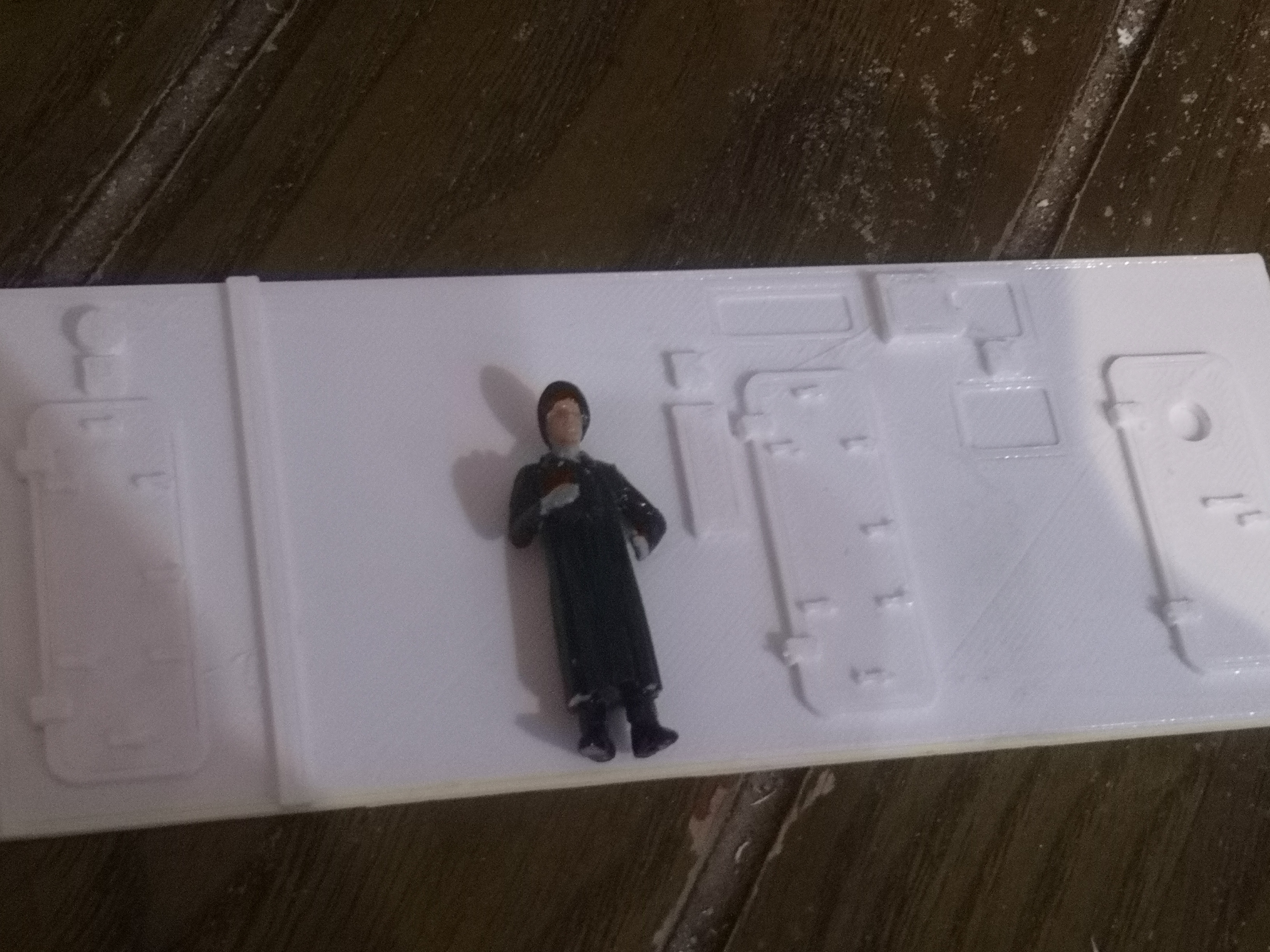
Ich habe dann mal den Aufbau auf dem Hauptdeck
an einer Stelle mit den Details konstruiert und gedruckt. Was mich
immer noch nervt und ich bisher nicht abstellen konnte, ist diese
Spur, die die Nozzle mit einem feinen Streifen auf der Oberfläche
hinterlässt. was bedingt alle Oberflächen nachzuarbeiten. Da könnte
ich echt ko***n, es nervt. Hier mal mit einer Figur im Maßstab 1:48
mit dargestellt, was schon gut passt. Mal sehen ob ich auch die
passenden Figuren dazu finde.
Sorry, bin grad nicht so drauf um
die Bilder als Thumbnail anzupassen.
09.03.2024
Hatte
ich schon lange nicht mehr, beinahe 12 Stunden geschlafen, ich war
also wirklich ziemlich fertig. Nachdem ich dann heute mal meine
Haushalt auf die Reihe gebracht habe, so habe ich mich nochmal mit
der PS 13 beschäftigt. Ich habe mal die Schleifeinsätze vermessen
und geschaut, ob man die mittels 3D-Druck reproduzieren kann. Die
mitgelieferten Einsätze sind soweit ganz okay, es wird aber für
bestimmte Anwendung erforderlich sein noch kleinere, bzw. angepasste
Einsätze zu haben, wie z. B. bei dem Zollkreuzer die Aufnahme für
die Scheuerleiste innen. Ich habe mir dann entsprechend den Massen
der vorhandenen Einsätze eine für die Scheuerleistenaufnahme
konstruiert, und auch gleich 4 Stück davon im Paket gedruckt.
Bewusst habe ich wegen der Kleinteile die Geschwindigkeit auf 30mm
herunter gesetzt, damit da auch was vernünftiges bei rauskommt.
Druckzeit für die 4 Teile grad mal eine Stunde. Und es funktioniert.
Nach dem Druck habe ich die Aufnahme der Einsätze noch etwas nach
gefeilt bis die Masse stimmten, und dann auch gleich in die Aufnahme
von dem Schleifpen eingeschoben und getestet. Die Ergebnisse dazu
findet Ihr unten als Bilder, Zeichnungen und Video. Wer sich auch mit
dem PROXXON PS 13 beschäftigen und nutzen will, dem stelle ich gerne
meine STL-Dateien, oder auch als STEP-Dateien zur Verfügung. Bei dem
Einsatz für die Aufnahme der Scheuerleiste habe ich mir folgendes
überlegt. Der tatsächliche Durchmesser der zu klebenden EPDM-Schnur
ist 4mm. Somit habe ich die Materialstärke des Schleifpapiers 2 mal
abgezogen, und kam damit auf eine Durchmesser von 3,2mm. Da es wenig
Sinn macht das Material zu klemmen, so werde ich mir noch eine
Klebehilfe mit Halbrund Ø4mm drucken, um dann die kleine Schleifpads
direkt auf die Einsätze aufzukleben. Wichtig ist noch zu wissen,
dass der Kopf keine Rotationsbewegung macht, sondern hin und her
pendelt, mit einem Hub von 2,5mm. Auch wird in der Anleitung darauf
hingewiesen, dass nur ganz leichter Druck ausgeübt werden soll. Ich
werde mir dann heute noch die Klebehilfe drucken, und dann mal Test
halber damit etwas schleifen. Ansonsten hier die Ergebnisse der
Arbeit dazu in Form von Bildern.
03.04.2024
Moin
zusammen, habe lange nichts mehr berichtet, wegen Arbeit und anderen
privaten Dingen, die Priorität haben. Aber es gibt was neues zu
berichten. Ich habe heute eine Email von der Zolldirektion Hamburg
bekommen, in dem meine Anfragen positiv bewertet und beantwortet
wurden. Die Originalfarben sind nun bekannt, und der Aufbau des
Verfahrkorbes auf der Steuerbordseite wurde technisch erklärt. Somit
ist die Lackierung und der technische Aufbau zu einer Sonderfunktion
des Modells schon mal geklärt.
Ich habe mich arbeitstechnisch
inzwischen soweit eingependelt, dass ich unter der Woche Abends
zumindest 2 Stunden noch was auf die Reihe bekomme. Ist aber
eigentlich zu wenig Zeit um größere Konstruktionen zu bearbeiten,
die langes durchdenken erfordern, wie eben die "FloStaBi"
oder die Überarbeitung der Antriebe (2 Versionen, brushed und
brushless). Auch die ursprünglich gedachte Bajonettkonstruktion wird
nochmals vereinfacht und auf eine rein formschlüssige Version
herunter gezogen, wobei die Abdichtung radial erfolgt und nicht mehr
axial. Die "FloStaBi" wird nun wie im Original innen an den
Schwimmkörpern um 15 Grad nach unten versetzt an der Innenseite
ihren Platz finden, wobei ich noch darüber nachsinne, wie ich das
ganze servicetechnisch bestens aufbauen kann, um es zu montieren, und
auf lange Sicht auch bestmöglich abdichten kann. Hier ist die
Abdichtung an der Achse der Flosse gemeint, die ja axial bestens
zentrisch passen soll und muss, um langfristig eine Abdichtung zu
ermöglichen.
Des weiteren muss ich mich noch um die
Werkzeuge für die Bearbeitung zum Oberflächenschleifen der Details
zum Aufbau kümmern. Hier sind noch einige kleinere Werkzeuge von
Nöten, umd die Details besser heraus zu arbeiten. Ich werde dazu
berichten.
Weiterhin habe ich mir auch Gedanken gemacht wegen
den Einschmelzmuttern. Diese sind bei flächenbündigen Teilen
durchaus brauchbar, jedoch bei Rundkörpern, wie den Schwimmkörpern
äußerst aufwendig einzubringen, was mich zurück zu der Lösung bei
meiner Gato brachte, diese montiert mit 2K-Kleber einzukleben. Dazu
wird zur winkligen Montage ein Hilfswerkzeug benötigt, was ich dann
auch noch zusätzlich konstruieren muss. Es gibt also noch genug
Arbeit, und ich sehe die erste Fahraktion im September mit einigen
Fragezeichen.
Aber es geht weiter, und ich denke, ich
habe das erste Tief der Lust auf die "Helgoland"
überwunden. Bis die Tage.
21.05.2024
Ich habe
lange nichts mehr berichtet, aber in Gedanken habe ich die
Konstruktion des Modells mehrfach neu durchdacht, und mich auch vor
dem Aufwand gescheut. Arbeitsbedingt war auch keine Zeit sich in die
Konstruktion neu einzuarbeiten. Von daher habe ich mich schrittweise
in der Konstruktion zurück bewegt und alles unnötige und/oder
falsche rausgeworfen. Nachdem ich die Zeichnungen vom Zollamt
bekommen hatte, stellte sich heraus, dass so ziemlich gar nichts im
Schwimmkörper aus dem Papierplan passte. Somit musste das ganze
aufgeräumt und neu aufgesetzt werden. Die Positionen der
FloStaBi-Anlage je Rumpf zweimal war falsch und wurde berichtigt.
Daraus folgend passte die Position des Antriebsmotors nicht mehr, und
es waren neue Wellen fällig. Auch das BSR saß etwas zu weit hinten
und musste nach vorne bewegt werden, außerdem ist im Original das
BSR um 10 Grad nach außen oben verdreht. Was bedeutet, alles wieder
aus der vorhanden Konstruktion herauszunehmen, neu anordnen und
komplett neu aufbauen.
Problem FloStaBi wurde dazu noch
damit kompliziert, das im Original die Hydraulik komplett an die
innere Bordwand gepackt wurde, was meine Idee mit direkter
Servoansteuerung torpedierte, und ich mir was anderes einfallen
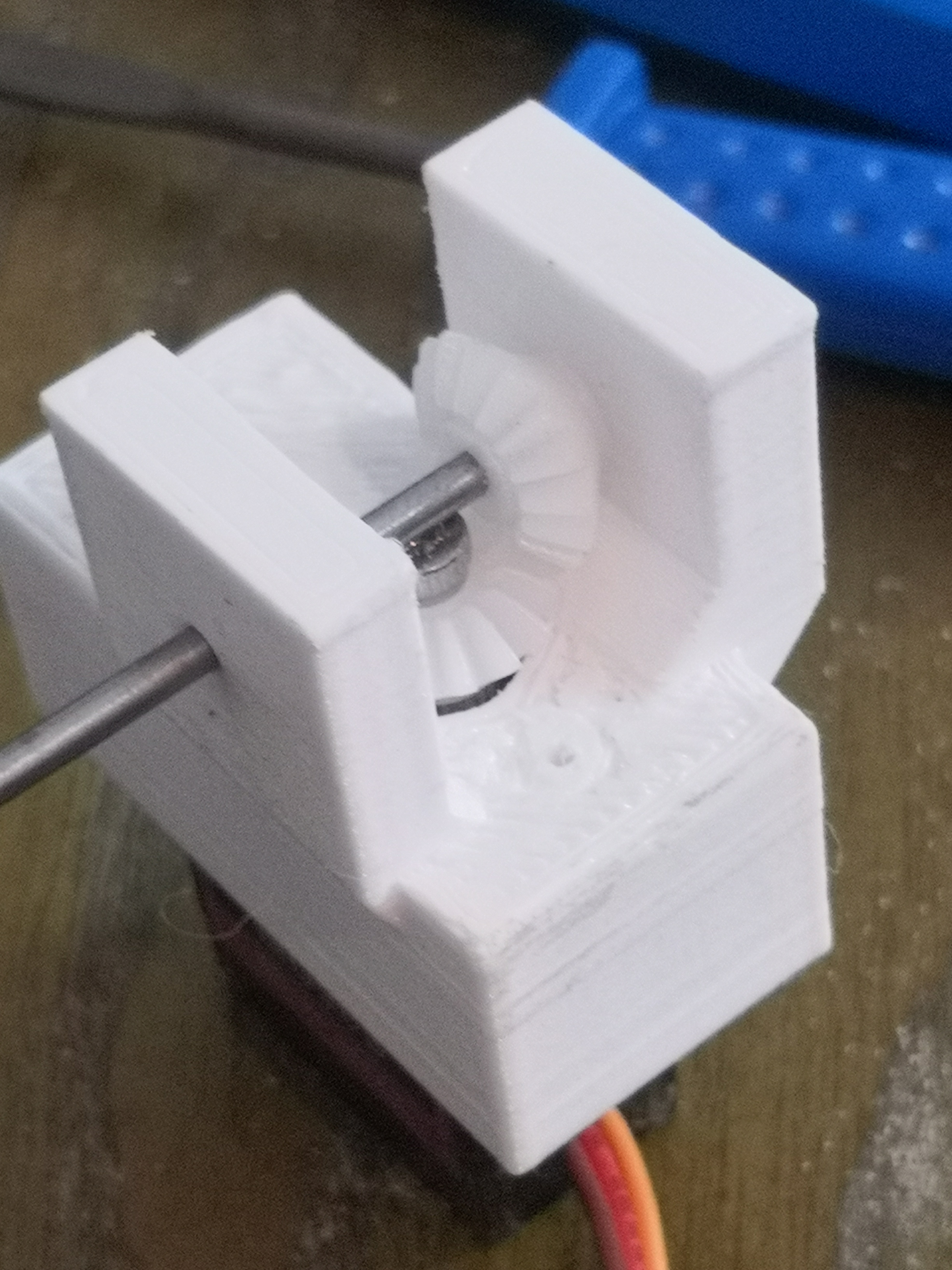
lassen musste. Meine erste Konstruktion schnitt die Antriebswelle,
was die Auslegung unmöglich machte. Der erste Versuch mit einem
Winkelgetriebe mit Kegelrädern war soweit gut, passte aber nicht im
Heckbereich in den Raum hinein. Der zweite Versuch mit 2 Zahnrädern
das ganze aus der Mitte zu verlagern sah schon besser aus. Diese
Auslegung wurde erst mal trocken umgesetzt und getestet. Ich musste
noch die Paarung der Zahnräder tauschen, weil ich nicht genügend
davon zur Verfügung hatte, schließlich brauche ich 8 Zahnräder für
ein Modell an der FloStaBi. Manche Zahnräder waren für die
Übersetzung ausgelegt, soll heißen, der Bohrungsdurchmesser war zu
groß. Somit habe ich mich dann an dem vorhanden Fundus orientiert
und eine Paarung gefunden die ich auch auf meine Innendurchmesser
anpassen konnte. Somit paart sich ein System mit Z26 und Z28, was den
Zahnradabstand gleich bleibend lässt und sich kaum auf die Funktion
auswirkt. Es passt vor allem in den entworfenen Grundkörper. Das
ganze vorne passte auf Anhieb, musste nur noch etwas zum
Schiffsmittel verschoben werden.
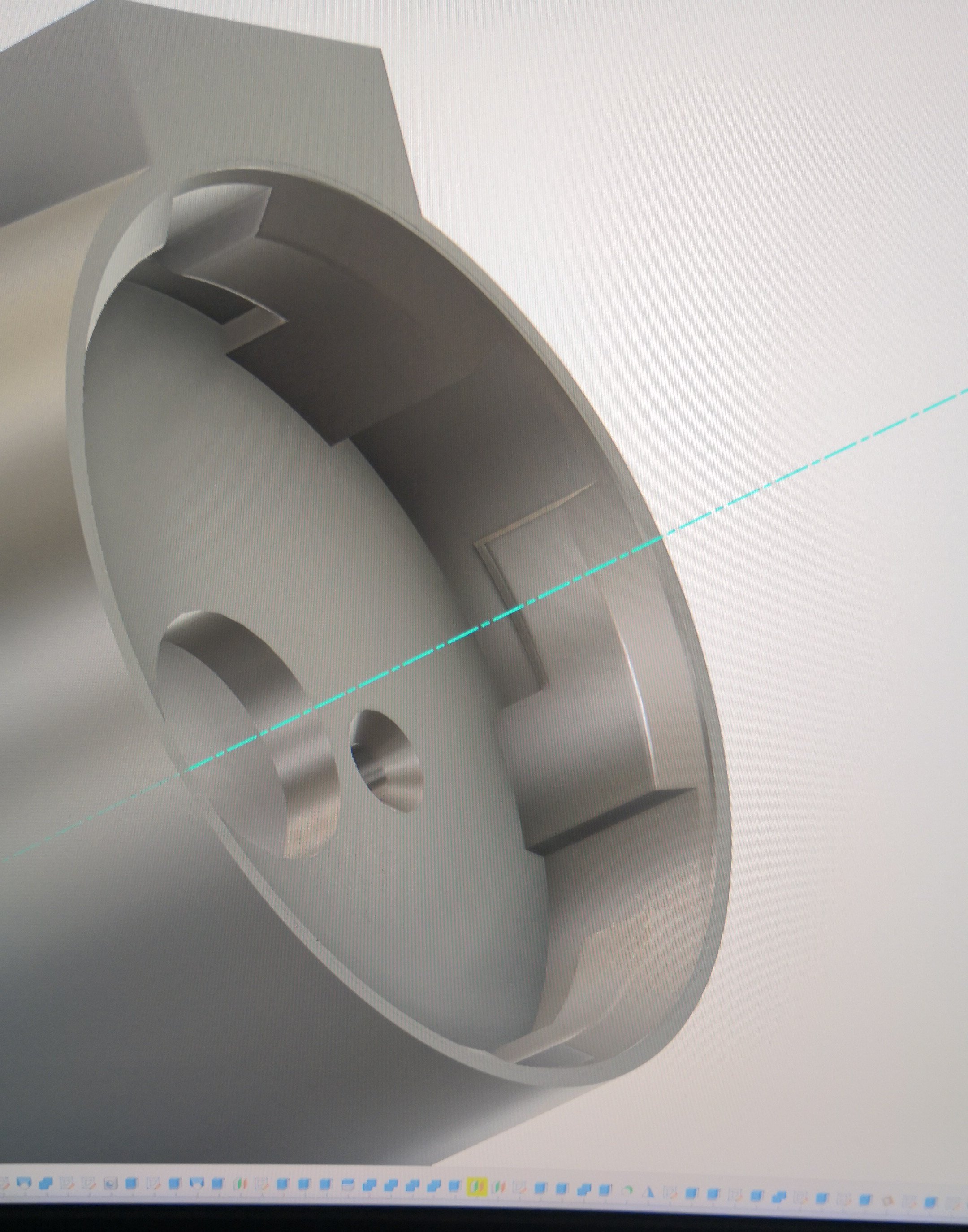
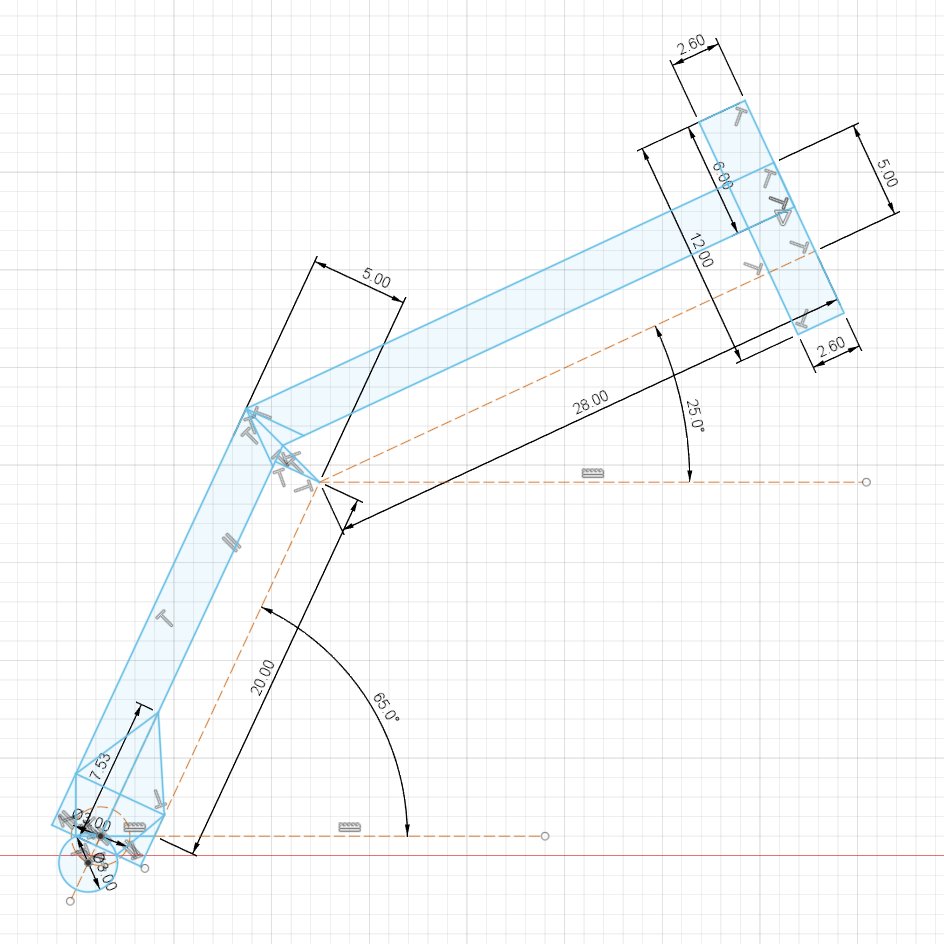
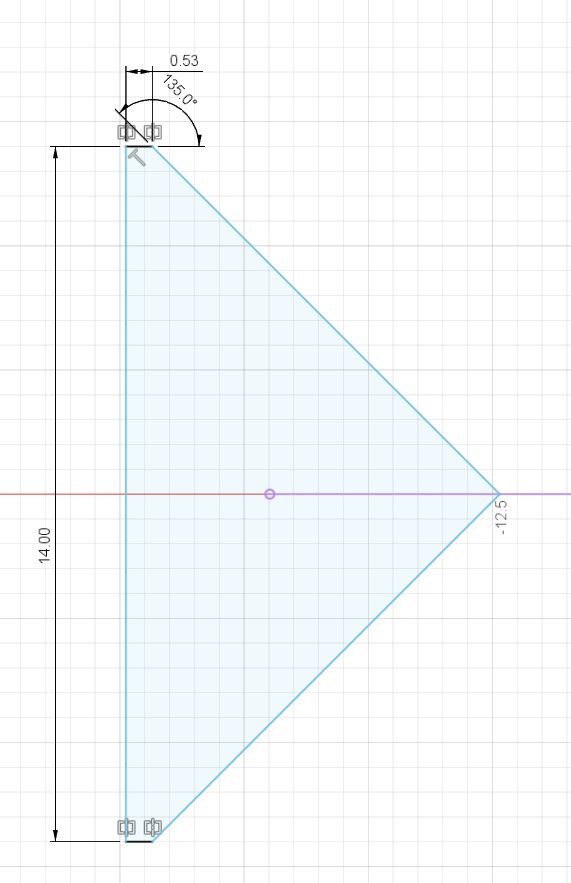
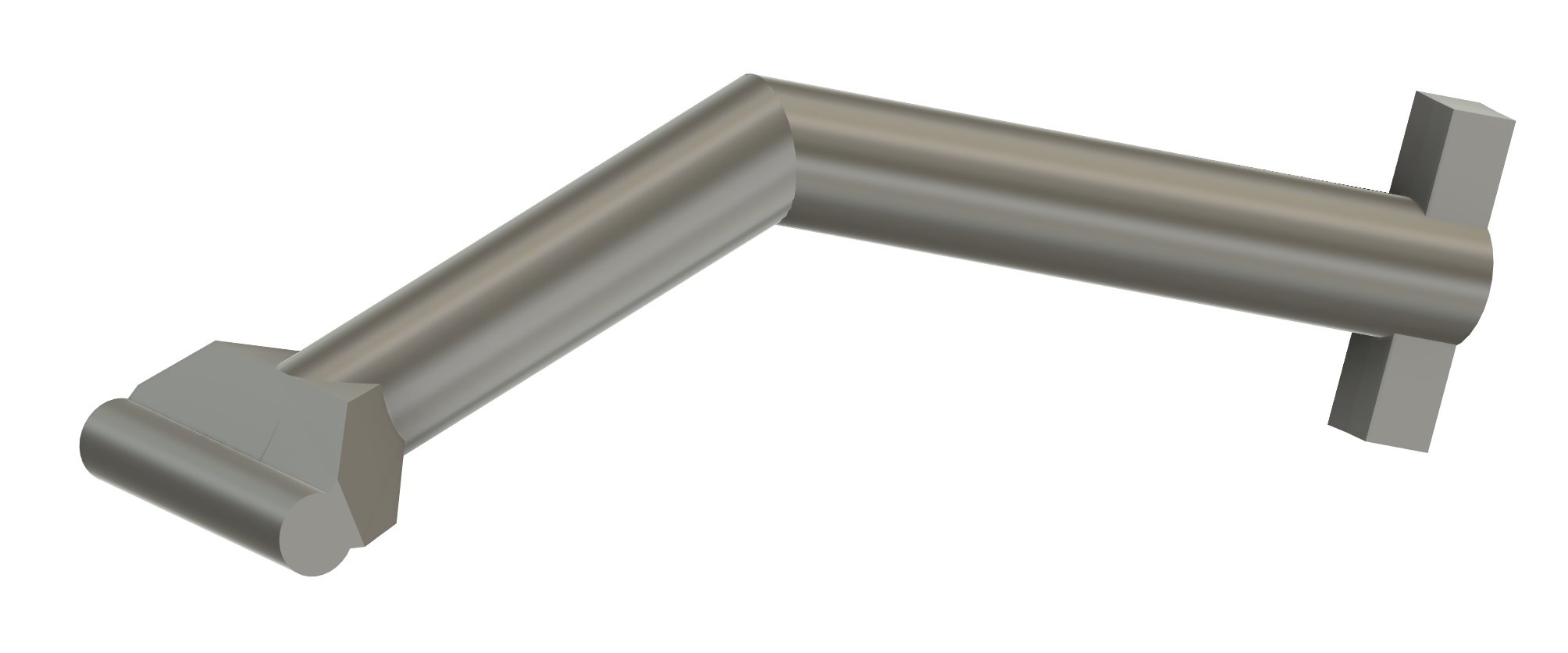
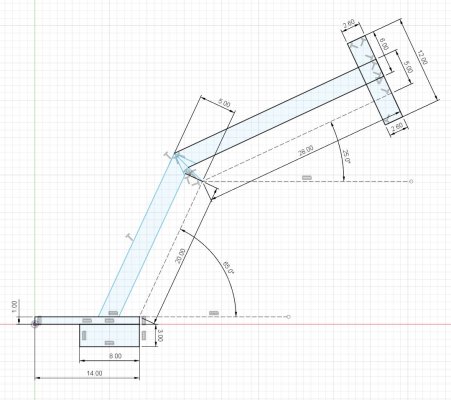
Dann bin ich natürlich
über den Original BSP gestolpert, der natürlich über ein
Winkelgetriebe auf einen beidseitig wirkenden Propeller arbeitet.
Auch hier wurde geprüft ob ein Winkelgetriebe das ganz in 1 zu 1
passen könnte, was es nicht brachte. Der Außendurchmesser des
Kegelrades war schon 11,3 mm, was bei einem Nenndurchmesser (vom
Original) von dem Rohr von 20 mm den Querschnitt erheblich
reduzierte. Ich habe dann mal geschaut was mein Fundus an andere
Zahnräder bereit hält und bin dann auf eine Paarung gekommen die
zumindest zweckmäßig sein könnte. Na ja, ich habe es versucht,
Ergebnisse siehe Bilder, aber es ist echt, ich sage mal
Haarsträubend, darüber nachzudenken ob das ganze für längere Zeit
funktioniert und hält. Alternativ sehe ich meine Konstruktion mit
den Magneten als nicht schlecht, aber ohne Lagerung ist das auch
Mist. Ich werde noch die Version mit Direktantrieb und Abdichtung
über WDR nachdenken. Ach so, natürlich war die Position des
bisherigen BSR auch nicht richtig und muss auch korrigiert werden.
Also war die viele Arbeit im Februar leider für die Katze.
Gestern
habe ich mich dann an die beiden Antriebsversionen gemacht, besonders
die
Halterung im Schwimmkörper. Besonderes Problem stellt sich dabei
heraus, dass ganze in die vorhandene Konstruktion einzubinden. Auch
sind die Übergänge der einzelnen Schwimmkörpersektionen zu
beachten, die ja auch in sich abdichtend in einander übergehen
sollen, und das ganze auch druckbar ausgelegt werden soll, stellte
sich gegen 23 Uhr auch als so nicht ganz einfach heraus. Es gibt also
noch massenhaft an konstruktiver Arbeit. Ob ich das ganze bis
September fahr fertig bekomme wage ich zu bezweifeln, aber ich bemühe
mich.
Bilder gibt es die Tage, für heute bin ich fertig
und alle.
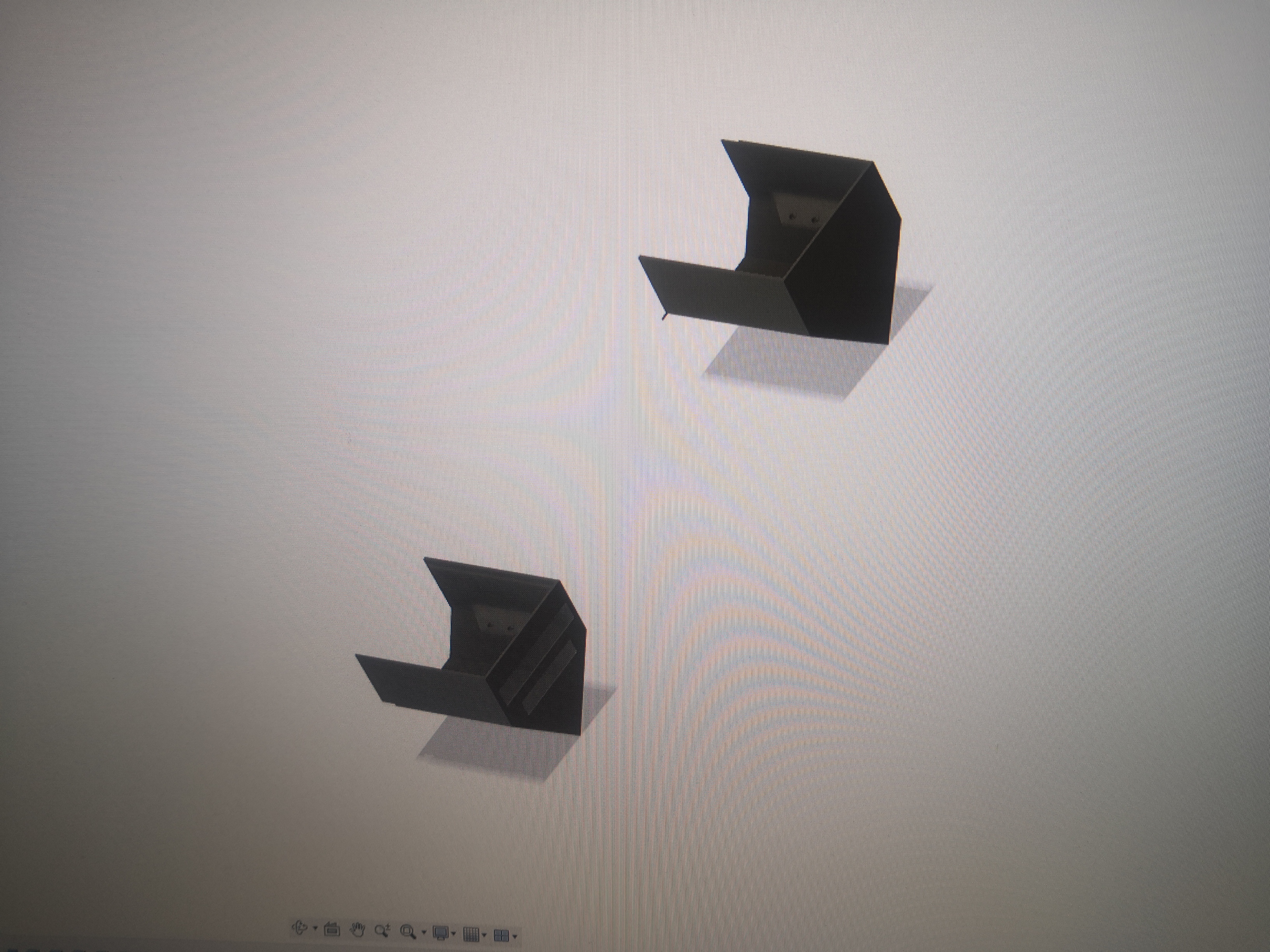
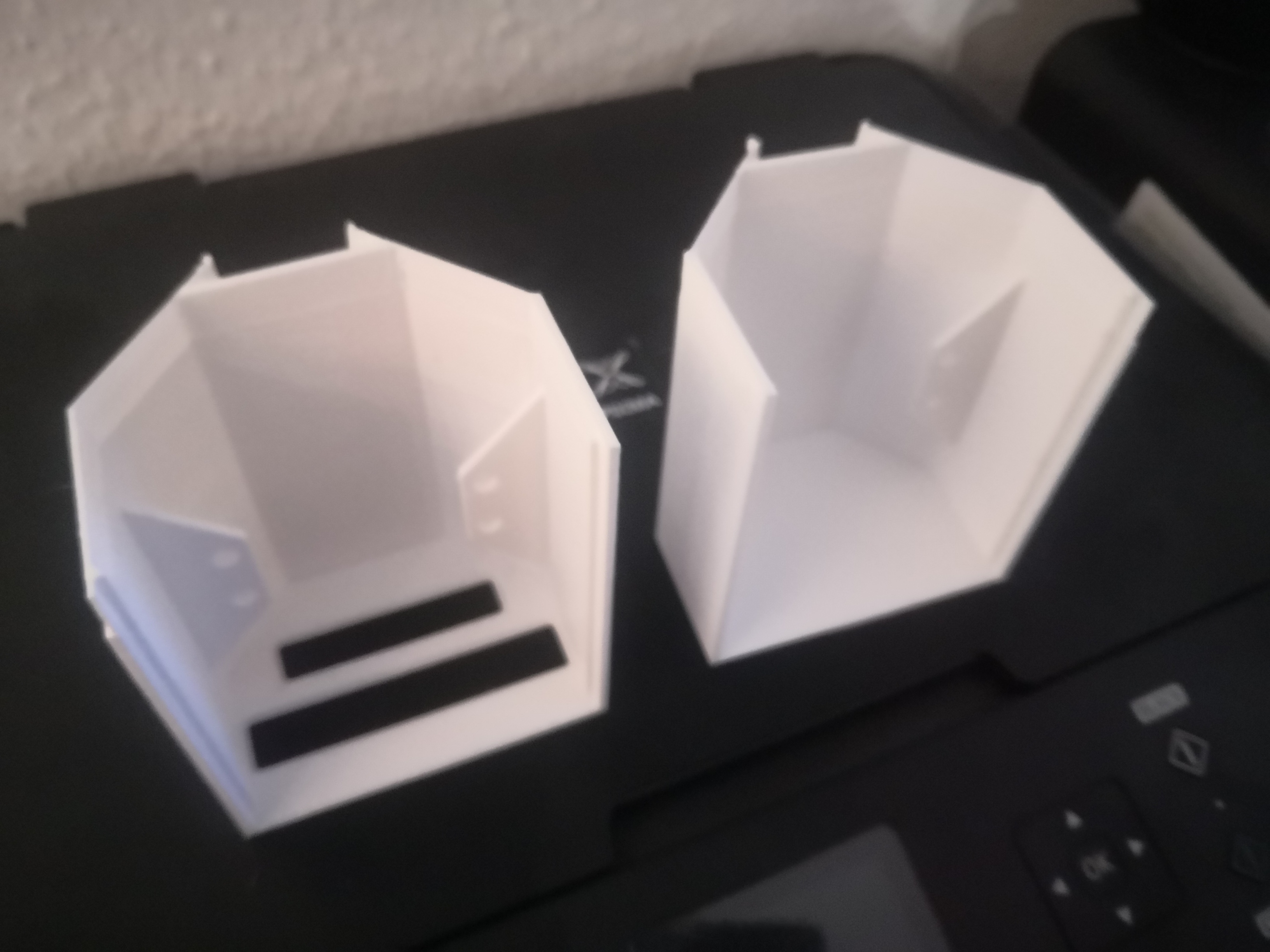
29.05.2024
Ich bin noch ein paar
Bilder von meine letzten Arbeiten schuldig. Nun denn, hier die
Ergebnisse vom Bildschirm, aber davon noch nichts gedruckt. Zur Info,
es wird Backbord konstruiert und anschließend der ganze Körper mit
Einsätzen einfach gespiegelt und gedruckt. Was noch fehlt sind die
Verschraubungen um die Einsätze in den Schwimmkörper zu befestigen.
Die Dichtungskante ist auch nicht zu sehen, aber schon vorhanden.

|

|
|
|
Wer
genau hingeschaut hat wird feststellen, dass im hinteren Bereich die
Wandstärke größer als vorne ist. Warum muss ich noch heraus
bekommen. Aber nicht mehr heute!
19.06.2024
Hallo
zusammen. Nach einer ganzen Zeit mit Arbeit und gesundheitlichen
Problemen geht es nun wieder langsam voran. Derzeit hat das Projekt
mehrere Baustellen. Da ich mir zwischenzeitlich die Farben zur
Lackierung habe mischen lassen, so steht natürlich auch das
spachteln und schleifen des Rumpfes an. Dabei stolperte ich über die
nicht vorhandene Mechanik über die höhenverstellbare Plattform auf
Steuerbordseite. Diese habe ich dann am letzten WE angefangen, und
gestern soweit aufgearbeitet, dass diese auch funktionieren sollte.
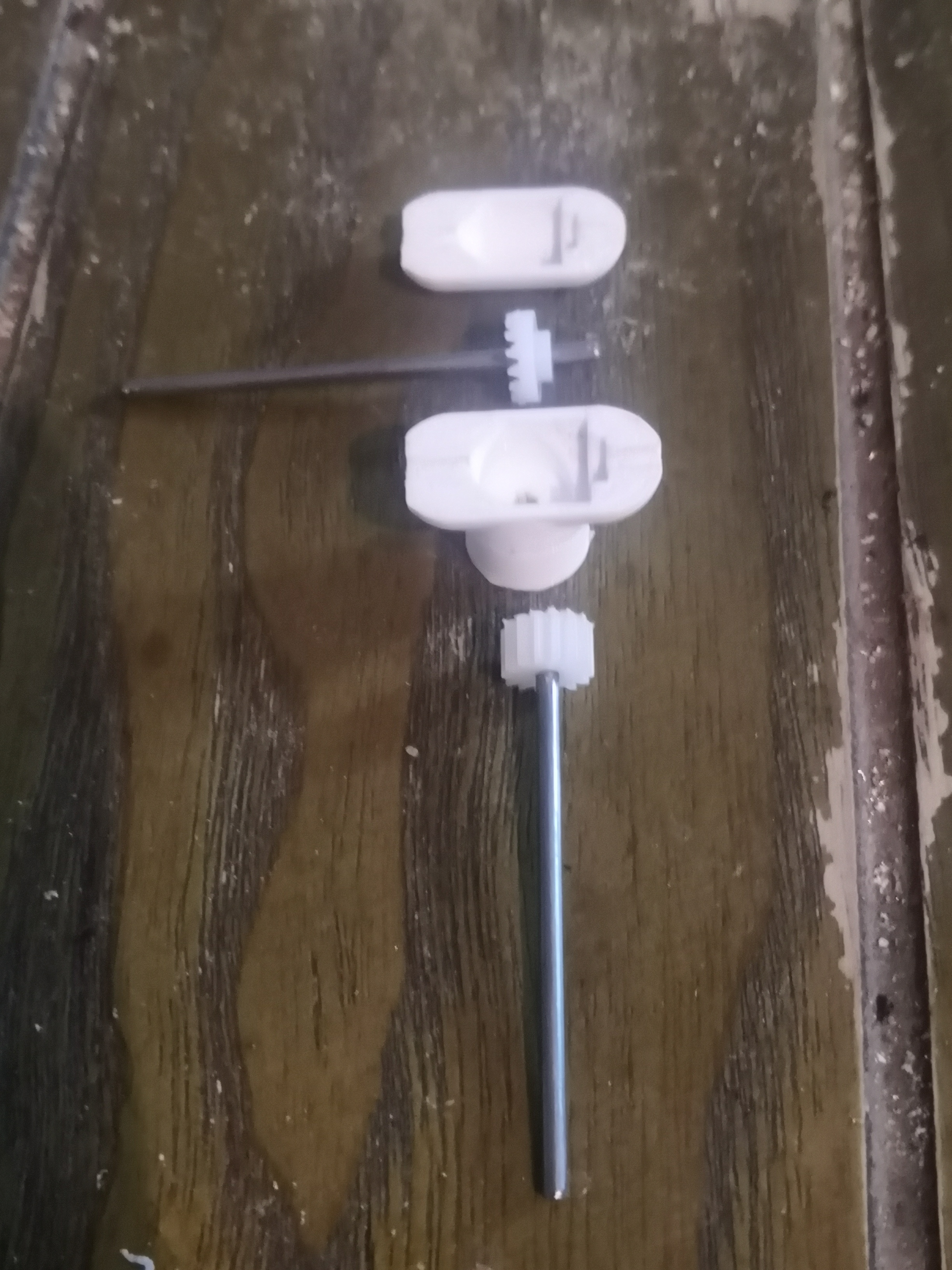
Die Teile mit Wellen, Zahnrädern und Gehäusen sind soweit fertig,
es muss nur noch zum Schluss ein Zahnrad auf der Welle fixiert /
verklebt werden. Danach sollte die Verstelleinheit soweit fertig
sein. Vor der Lackierung müssen noch die beiden Durchbrüche für
die Zahnräder in die Ausnehmung, damit die Zahnstangen auch
angetrieben werden können. Die Plattform selbst mit den Zahnstangen
werde ich nach der Lackierung dann zusammen montieren. Das Getriebe
ist zweistufig, ein Schneckenantrieb 30:1 sowie eine
Zahnradübersetzungen 2,5:1, was eine Drehzahlreduzierung von 3000
1/min auf ca. 30 1/min bedeutet, womit eine schön langsame
Verfahrbewegung erreicht wird.
|

|
|
|
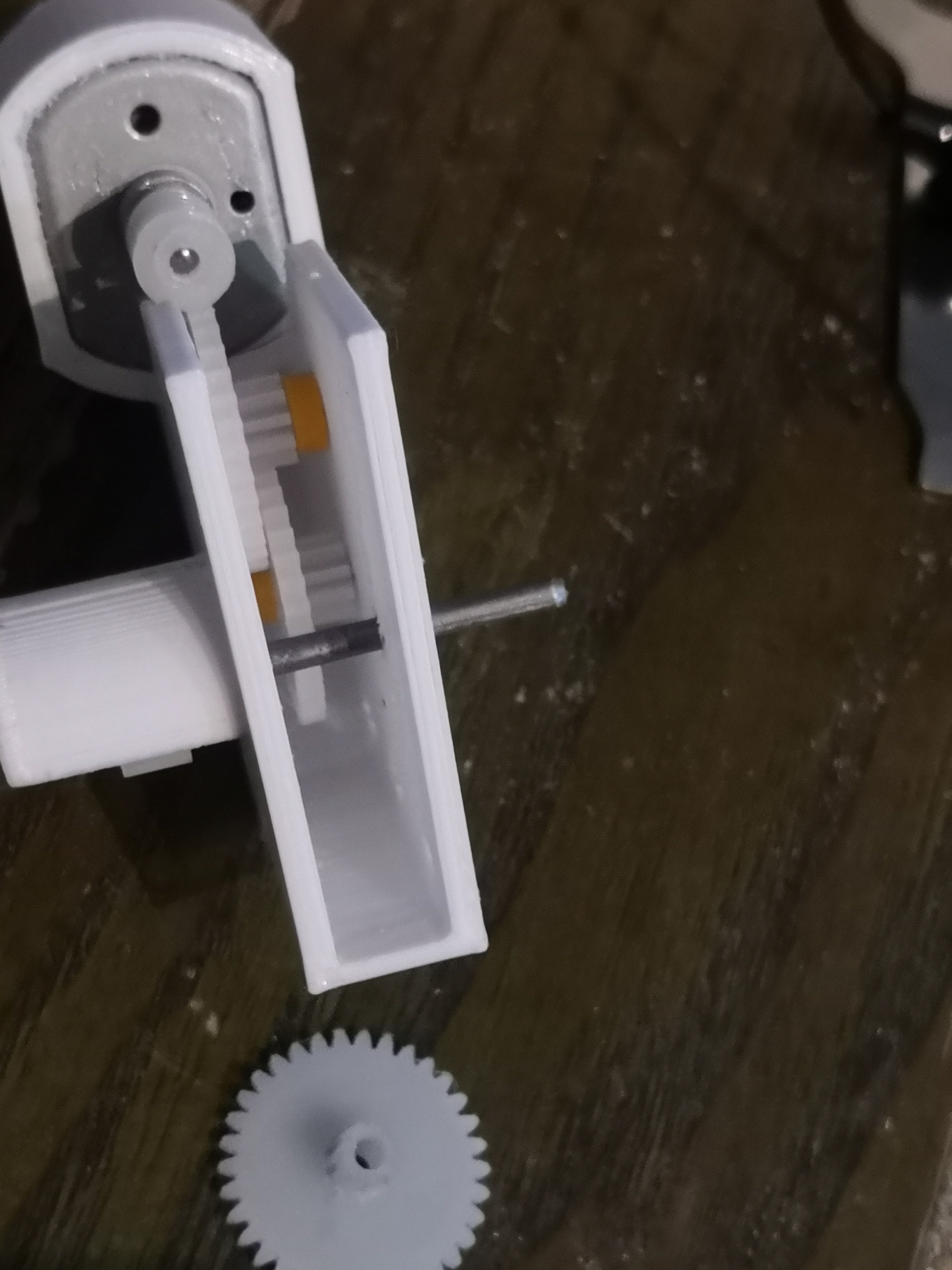
20.06.2024
Wie
das denn so ist wenn man dem Konstruktionswahn erliegt, dann
passieren auch Fehler. So schön das ganz auch aussieht, es passt
nicht. Ich muss den Motor noch mal anders positionieren, da er so in
Richtung unten zu lang ist. Also das ganze noch mal drehen und
schauen ob es dann passt. Ich werde auch noch versuchen mit größeren
Zahnrädern evtl. eine Stufe weniger zu schaffen, was den gesamten
Aufbau etwas vereinfacht.
04.07.2024
In 10
Tagen habe ich Urlaub, und da freue ich mich richtig drauf, mich mal
wieder zu 100% auf das Projekt konzentrieren zu
können.
Zwischenzeitlich habe ich mal versucht das
Konstruktions- und Planungschaos zu beseitigen,
darum hier mal
die Liste der möglichen bzw. geplanten Funktionen im Modell:
-
Vorwärts / Rückwärts - Rechts / links (je Schwimmkörper ein Motor
und Ruder)
- Rumpf 2 x Querstahlruder - Rumpf 4 x FloStaBi (nach
innen zeigend)(AUTO-Mode)
- Steuerbord Beiboot aussetzen und
fahren
- Steuerbord Boarding Plattform auf und ab
-
Mittschiffs Anker werfen und einholen
- Steuerbord Löschmonitor
mit Wasser versorgen
- Backbord und Steuerbord je 2
Positionslaternen in der Mulde
- Oberdeck Beleuchtung
-
Brücke Weißlicht / Rotlicht
- Aufbau: Übrige Fenster dezent
beleuchtet
- Peildeck 4 Scheinwerfer leuchten (und bewegen)
-
Mast mit Positionslaternen beleuchtet
- Mast 2 x Radar drehen
-
Rumpf Soundmodul
Was ich noch gar nicht erwähnt habe ist,
dass ich mir die passenden Farben habe mischen
lassen.
04.07.2024
Freitag viel mir dann auf, dass ja
noch das Schanzkleid am Rumpf fehlt. Also wurde am Wochenende
verschärft diese Baustelle beackert. An und für sich soll das
gleich mit der vorderen Rumpfsektion mit gedruckt werden, was ich
demnächst auch so als Druckdatei abspeichern werde. Jedenfalls war
es nach dem drucken und sauber machen des Teiles nicht ganz einfach
das ganze stumpf mit Sekundenkleber vorne auf den Rumpf zu kleben. Es
gab wieder leichte Absätze die nun auch noch gespachtelt und
verschliffen werden müssen. Das ewige Leiden der
Oberflächenbehandlung halt. Nun sieht das aber auch schon etwas mehr
nach Schiff aus. Diese Woche werde ich mich noch weiter mit
Kleinigkeiten und Details beschäftigen, kommende Woche im Urlaub
geht es dann daran die Schwimmkörper fertig durchzukonstruieren und
auch gleich zu drucken. Evtl. schaffe ich es dann sogar noch den
Prototyp am 28.07.2024 mit fertigen Schwimmkörpern mit nach Winsen
Luhe zu nehmen. Also technisch fertig, aber ohne
Lack.
28.10.2024
Es gibt nun noch einiges
nachzutragen, und das wie folgt:
1. Vorstellung des
Prototyps in der vorhandenen Bausituation auf dem Modellbautreffen in
Winsen an der Luhe am 28.07.2024
2. Vorbereitungen und
Montage der Schwimmkörper und der verbauten Technik darin für
Greven.
3. Erste kleine Probefahrt beim Schaufahren in
Greven.
4. Weiter gehende Konstruktion der Aufbauten und
parallele Gewichtsverfolgung.
5. Nachträgliche
Überprüfung und daraus folgende Konstruktionsänderungen der
Schwimmkörper mit verbauter Technik
Vorstellung des
Prototyps in der vorhandenen Bausituation auf dem Modellbautreffen in
Winsen an der Luhe am 28.07.2024.
In
dem dargestellten Bauzustand hatte ich den ZK mit in Winsen. Da wir
tolles Wetter und eine sehr großen Zuspruch an Publikum hatten, so
war auch meine Baustelle recht gefragt, und ich durfte viele Fragen
von interessierten Besuchern beantworten.
Vorbereitungen
und Montage der Schwimmkörper und der verbauten Technik darin für
Greven.
Zumindest
hatte ich es geschafft bis Greven die Schwimmkörper fertig zu
spachteln, abzudichten und zu montieren. So sah das dann aus:
Erste
kleine Probefahrt beim Schaufahren in Greven
Ich habe echt
lange gezögert das Modell in dieser Bausituation ins Wasser zu
geben. Aber ohne es zu versuchen kann man ja auch nichts daraus
lernen. Die Schwimmkörper waren mit den Einbauten komplett bestückt,
und alle Einbausektionen waren mit dem Dichtmittel von Sika Marine
sauber eingedichtet worden. Akku technisch bestückt war das Modell
mit 3 x 2 LiFePo4 Akkus mit je 3,3Volt und 6,5Ah pro Zelle. Somit
stand genug Energie mit 19,5Ah zur Verfügung. Natürlich fliegende
Kabel und alles soweit noch provisorisch. Ich hatte noch zwei
Bleiakkus 6V mitgenommen um ggf. mal ein wenig nachzutrimmen wo es
nötig war. Das Modell war zu diesem Zeitpunkt gut 5800 Gramm, was
gut ein Kilo unter dem errechneten Maximalgewicht von 6818 Gramm lag.
Der Antrieb war mit 35mm Standardpropellern von Graupner bestückt,
womit schon klar war, dass der Rückwärtsgang schon mal schlecht
ausfallen würde. Dazu kommt auch noch, dass die mitgelieferten
Regler Rückwärts auch nur die halbe Leistung bereitstellen. Auf
eine Grundierung und Lackierung musste ich aus Zeitmangel verzichten,
was die Situation nicht besser machte.
Zunächst wurde
erst einmal die Lage im Wasser geprüft, was ein leicht zu tiefes
eintauchen im hinteren Bereich zeigte. Darum habe ich zwei Bleiakkus
mal etwas vor der Mitte mit rein gestellt, um das etwas
auszugleichen. Es zeigte sich jedoch schon, das der vorhandene
Auftrieb nicht so ganz ausreichend sein wird, als vorher berechnet.
Das Modell tauchte schon bis zur Mitte der Verbinder ins Wasser ein,
womit sich ein leicht mangelnder Auftrieb bestätigte. Danach wurde
erst mal versucht die Querstrahlruder in Betrieb zu nehmen. Am
Vorabend stellte sich heraus, das der eine Fahrtregler nicht mehr
wollte. Das erste Negativerlebnis stellte sich ein. Der eine Antrieb
fuhr hoch, jedoch drehte sich die Schaufel so gut wie gar nicht. Wir
schlossen daraus anschließend, dass sich das PETG mit Wasser
gesättigt hatte, und darum sich das gequetschte Material auf der
Welle nicht mehr fest saß, also die Welle durchrutschte. Auch dieses
Material war zu diesem Zeitpunkt nicht lackiert, was wohl mit der
Hauptgrund für die Reaktion war.
Danach wurde versucht
mit dm Modell ein wenig Fahrt aufzunehmen. Aus welchen Gründen auch
immer war auf der Backbordseite etwas weniger Vortrieb zu verzeichnen
als auf Steuerbordseite. Das hat sich aber mit der Zeit etwas gelegt,
und ist inzwischen fast gleichförmig. Es zeigte sich auch, das eine
lineare Kurvenführung der Ansteuerung dem Modell nicht gerecht wird.
Hier muss ich auch noch eine andere Kurve einstellen, um langsamere
Drehzahlen zu bekommen. Das umschalten von Voraus auf zurück kam
auch sehr ruckartig, und wegen der Propeller war die Rückwärtsfahrt
auch sehr schwach in der Funktion. Was äußerst erstaunlich war, war
die Schallemission des Antriebes, praktisch fast nicht zu hören.
Somit hatte sich die Aufhängung mittels Gummilagern aus der
Lüftermontage voll positiv heraus gestellt. Danach wurden vorsichtig
kleine Manöver mit kleiner Fahrt gefahren und die Wirkung der Ruder
beurteilt. Die Wirkung der Ruder ist an und für sich ausreichend,
könnte aber noch durch eine leichte Vergrößerung um 10 - 20%
durchaus verbessert werden. Nach dem drehen von 2 Runden rund um die
Hafenanlage haben wir das Modell aus dem Wasser geholt, und danach
erst mal ein paar Runden gefachsimpelt.
Nochmals ganz
lieben Dank an Lutz und Oliver für die tollen Bilder und Videos zur
Probefahrt.
Weiter
gehende Konstruktion der Aufbauten und parallele
Gewichtsverfolgung.
Ein
Teil der senkrechten Wände auf dem Hauptdeck hatte ich ja schon mal
vor Wochen konstruiert und gedruckt. Nun ging es darum die weiteren
einzelnen Wände fertig zu zeichnen und zu drucken, und sich dabei
auch noch Gedanken zu machen, wie das ganze dann zusammen geklebt
wird, und wo es evtl. noch Verstärkungswinkel braucht. Ich habe mich
grob an die Anleitung vom Papiermodell gehalten, und die Teile, die
für den Drucker zu groß waren entsprechend geteilt. Das ganze hat
dann noch die passenden Teilenummern bekommen. Nach dem Druck wurden
die ganzen Teile soweit gesäubert und beschnitten, sowie die Kanten
gebrochen und dann schon mal mit der Nummer auf der Rückseite
markiert. Einige Teile wurden dann schon passend zusammen geklebt, so
das die umlaufende Aufbaustruktur entsteht. Unten noch die
Darstellung der einzelnen Decks in der Waagerechten, darunter die
einzelnen Schichten, wie sich die Decks weiter nach oben aufbauen.
Das Brückendeck wird wohl im Bereich der Brücke noch ausgeschnitten
um Gewicht zu sparen. Es fehlen noch die Schornsteine und eine Menge
an Details wie Lampen, Kameras, Lüfter und viel Kleinkram. Das
errechnete Gewicht des ganzen Modells sollte bei 6818 Gramm liegen,
laut Tabelle liege ich nun 213 Gramm drüber, und bin noch nicht
fertig.
Nachträgliche
Überprüfung und daraus folgende Konstruktionsänderungen der
Schwimmkörper mit verbauter Technik
Schon
bei der Montage war mir bei einigen Details nicht ganz wohl bei der
Sache, aber im Nachhinein kann ich sagen, dass der Schaden der ersten
Probefahrt sich soweit in Grenzen hält.
Der Aufbau des
Antriebes ist im Detail teilweise etwas kompliziert und muss genau
abgestimmt sein. Das ist mir auf der Backbordseite wohl nicht so gut
gelungen, was sich aber nach einigen Testläufen zwischenzeitlich
durch einlaufen der Anlage relativiert hat. Die beiden mitgelieferten
Fahrtregler sind echt dezent und mit "SIE" anzusprechen,
mit anderen Worten, die Zicken gerne rum. Gestern hatte ich durch
Tausch der Regler mal endlich eine vernünftige Ansprache durch den
Sender. Endgültig möchte ich diese aber gerne durch andere Regler
mit direkter Ansprache und 100% Vor- und Rückwärtsfahrt
austauschen. Auch der Versuch mit den noch vorhanden anderen
Brushless -
Motoren mit weniger Drehzahl pro Volt steht noch als Option aus, was
natürlich auch eine neue Ausführung des hinteren Schwimmkörpers
erfordert.
Die FloStaBi zickt derzeit auch herum, derzeit
laufen nur die beiden Servos hinten vernünftig, aber es gibt immer
noch Störungen. Die Einheit Steuerbord vorne läuft gar nicht, die
Einheit Backbord vorne scheint ein mechanisches Problem zu haben. Das
erfordert wohl wieder einen Eingriff in die versiegelten
Schwimmkörper, um zu prüfen was denn da wieder nicht so läuft oder
ausgefallen ist. Nach einer detaillierten Betrachtung der verbauten
Servos wird es sich hierbei definitiv um ein Problem der Dichtigkeit
des Servogehäuses handeln. Natürlich als Massenware gekauft scheint
dieser Servo für die gestellte Aufgabe so ohne weiteres nicht
geeignet zu sein, besonders in dem Bereich vorne mit dem im selben
Raum verbauten Querstrahlruder, welches wohl für den kleinen
Wassereinbruch als Ursache betrachtet werden darf. Hier ist wohl eine
nochmalige detaillierte Betrachtung der Ausführung der Abdichtung
und Ausrichtung erforderlich, vor allem welche Möglichkeiten zu
Abdichtung des oder der Servos gegen Wassereinbruch möglich
sind.
Die Schaufeln der Querstrahlruder werden dann auf jeden
Fall noch lackiert und eine Bohrung Ø 1 mm durch die Welle und
Schaufelkörper gebohrt und ein Bolzen durchgesteckt, damit es nicht
wieder zum frei drehen der Schaufel selbst kommt.
22.11.2024
Aufbauten
und die hier bestehende Komplexität
In
den letzten Tagen und Wochen habe ich mich mit der Detailkonstruktion
und des Aufbaus der Aufbauten beschäftigt. Vorab bemerkt hatte ich
echt nicht gedacht, dass der Aufbau sich so komplex und schwierig
darstellt. Der Druck der Teile für das 1. Aufbaudeck oder Hauptdeck
verlief soweit unproblematisch, und ich habe mich an die Vorgaben des
Papiermodells gehalten. Das war in sofern auch nicht falsch, hat sich
aber im Nachhinein an einigen Stellen etwas als nicht ganz korrekt
herausgestellt. Entweder war ich bei den Maßen zu großzügig, oder
auch nicht ganz aufmerksam. Zumindest gibt es einige Stellen, an
denen ich die Positionierung der zusätzlichen Aufbauten auf dem
Hauptdeck etwas nacharbeiten muss, und einige Auflageflächen für
die zusätzlichen Schränke und Geräte passend zu verschieben. Hier
muss ich nochmals alles im Detail überarbeiten und ggf. neu an
arbeiten, bzw. verschieben. Auch die Montage des 2. Aufbaudecks muss
ich anders angehen, damit erstens keine Verwindungen entstehen, und
zweitens die Montage in sich logisch und fehlerfrei verlaufen kann,
um für dritte das ganze einfach und logisch nachzuvollziehen ist.
Bei einigen Teilen des 2. Aufbaudecks musste ich feststellen, dass
ich wohl Fehler in der Extrusion eingebracht habe. Zumindest war die
Materialstärke bei CURA dann an einigen Stellen geringer als
geplant. Auch hier muss ich wohl nochmal nacharbeiten und den Fehler
finden.
Mit der Druckausführung des vorderen Aufbaudecks war
ich auch nicht zufrieden. Es ergaben sich drucktechnisch so manche
unschöne Ergebnisse wie ungleichmäßige horizontale Flächen und
Absätze in der Fläche. Hier ist zu überlegen, wie man das Ergebnis
besser zu erstellen ist, ggf. durch den Druck der Teile einzeln, mit
nachträglichem winkligem verkleben der Teile, was sich grundsätzlich
als schwierig heraus stellt. Was sich als besonders wichtig beim
zusammen kleben der einzelne Komponente heraus gestellt hat ist, dass
es wichtig ist von eindeutigen rechtwinkligen Ecken auszugehen, und
die Winkel zu beachten. Mein Fehler war es, die senkrechten Teile des
ersten Aufbaudecks ohne genaue Positionierung zu verkleben, was in
der Folge eine leichte Verwindung des Aufbaus entstehen lässt.
Daraus ergab sich eine Verwindung, die das rechtwinklige einkleben
des Brückenbasisdecks nicht möglich macht. Hier ergab es eine
Verschiebung in der Längsachse um 4,2 mm. Da die Klebeverbindungen
dreidimensional sind, und teilweise gar nicht mehr zu erreichen sind,
so wäre der Versuch einer nachträglichen Trennung und Nacharbeit
die Folge zig Teile neu zu drucken, was mir mein derzeitiges Budget
nicht erlaubt. Auch die hier vorhandenen großen Flächen erfordern
noch eine zusätzliche Verstärkung in Form von Rippen, die eine
gewisse Stabilität in der Fläche ergeben. Somit sind diese Teile
erneut mit diesen Verstärkungen zu drucken. Alles für mich in
Sachen 3D-Druck Neuland und noch ohne Erfahrung. Man lernt dazu, und
nie aus.
Vordere
Module des Schwimmkörpers
Wie
schon angemerkt gibt es Probleme nach der ersten Probefahrt mit dem
vorderen Modulen des Schwimmkörpers. Nun, nach einiger Zeit des
Stillstandes habe ich nun auf Steuerbord Seite das Problem, das der
Antrieb des Querstahlruders sehr schwergängig ist, Sprich, der
Antrieb gar nicht mehr elektrisch anspricht und fast Kurzschlussstrom
zieht. Hier scheint sich im Antrieb etwas ergeben zu haben, was den
Antrieb blockiert. Was auch möglich wäre ist eine lose
Madenschraube, was ich aber im Moment nicht nachvollziehen kann. Die
Aufklärung dazu folgt. Ich werde daher den Schwimmkörper auf
Steuerbordseite demontieren, und dann die BSR - Einheit versuchen
ohne Schaden für das Rumpfmodul der Einheit auszubauen. Ich denke,
das ich die Eigenschaften des PETG in Bezug auf Wasseraufnahme noch
einmal ganz neu betrachten und wissenschaftlich eruieren muss, um
hier ein eindeutiges Ergebnis für eine langfristige Nutzung der
Einheit zu erreichen. Es wird wohl darauf hinaus laufen alle
gedruckten Teile mit einem leichten Überzug von Epoxid zu versehen,
um die Aufnahme von Wasser in den Werkstoff zu verhindern, der
anscheinend zu den Blockierungen führt. Auch denkbar ist, jede
Einheit in sich Wasserdicht auszuführen, und so zumindest für jede
Einheit, BSR und FloStaBi, wasserdicht auszuführen. Es müssen daher
hier detaillierte Forschungsergebnisse her, damit das Projekt
wirklich "läuft".
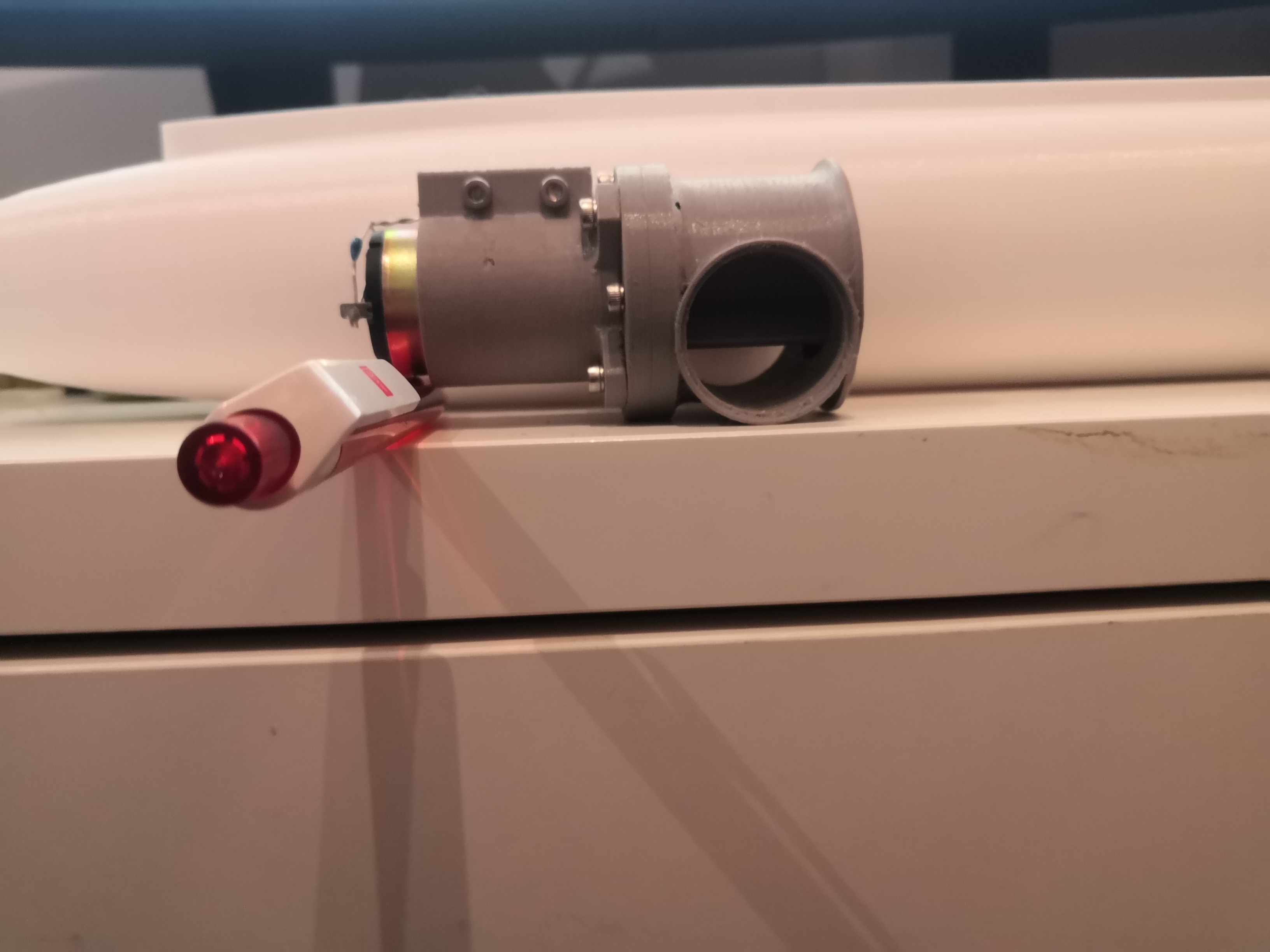
20.02.2025
Ich
habe mich dann mal wieder der Problematik der vorderen Schwimmkörper
herangemacht und versucht die Querstrahlruder und Servoeinheit der
FloStaBi auf der Backbordseite zerstörungsfrei auszubauen. Keine
Chance. Die Abdichtung mittels "Sikaflex 291i" verklebt die
Teile wirklich so heftig, dass eine zerstörungsfreie Trennung wie
geplant nicht möglich war. Ich habe dann mittels "Dremel"
den inneren Bereich frei geschnitten, und dann Stück für Stück
mittels Messer die Restteile von einander getrennt. Die
Querstrahlrudereinheit habe ich dann im ganzen aus dem vorderen Modul
herausnehmen können, und wie schon befürchtet war dort durch
Wassereinbruch der Motor außen recht stark verrostet. Die folgenden
Bilder verdeutlichen schon, was da so abgegangen ist.
Nach
der ersten logischen Betrachtung zeigt sich die falsche Auslegung der
Antriebseinheit, die in sich nicht geschlossen ist. Somit ergab sich
die Möglichkeit, das Wasser durch die Schaufeleinheit über den WDR
in den Motorbereich eindringen konnte, der das ganze dann zum
verrosten führte. Da von da aus eine offen Verbindung in den
Innenraum des Modells vorhanden war konnte ohne weiteres Wasser
eindringen.
Logische Konsequenz daraus ist, den Antriebsmotor
komplett eingekapselt auszulegen, so dass maximal das, durch
Erwärmung des Antriebes vergrößerte Luftvolumen über den WDR sich
nach außen ausdehnen kann. Diese Überlegung lässt auch die Wahl
auf eine wasserdichten Antrieb in Form eines Brushless Motors
schließen, welcher dann, trotz evtl. eindringendem Wassers seine
Dienst verrichten kann. Hier ist evtl. ein Raum zur Wärmeausdehnung
der erwärmten Luft vorzusehen, damit nicht ein "Atmen" der
Einheit sich über den Antriebsstrang auswirkt. Eventuell ist es
sinnvoll eine Testeinheit vorher aufzubauen, um die
Funktionstüchtigkeit im Langzeit-betrieb zu prüfen. Okay, ein
Querstrahlruder ist letztendlich nicht oft im Betrieb, aber die
Auslegung hier für ein SWATH - Schiff in diesem Maßstab erfordert
es schon, dass diese Einheit auf ein "drop and forget"
System ausgelegt sein sollte, und jahrelang ohne Probleme laufen
sollte.
Gleiches gilt hier für die Auslegung der Servos
für die FloStaBi. Im hinteren Bereich scheine ich einfach Glück
gehabt zu haben, dort laufen die Servos immer noch. Vorne ist der
Servo auch abgesoffen, und sah von innen auch nicht toll aus. In das
Getriebe ist Wasser eingedrungen, bis hin zur Elektronik. Auch hier
ist grundsätzlich die Auslegung neu zu überdenken. Folgende
Optionen stellen sich aus der Problematik vor.
1. Ein
Wasserdichter Servo, der natürlich erheblich kostspieliger wird.
2.
Den vorhandenen Servo so zu überarbeiten, dass er soweit wasserdicht
gestaltet wird und auch komplett gekapselt wird, so dass auch hier
kein Wasser zum Servo über Umwege eindringen kann.
Ich werde
erst mal die zweite Option verfolgen, da ich von den Servos noch
einige in der Lagerhaltung habe. Das bedeutet:
1. Den oberen
Getrieberaum komplett mit fett zu füllen,
2. Das dreiteilige
Gehäuse komplett zu verkleben, und somit abzudichten.
2a. Das
ganze Gehäuse mittels Olivenöl zu fluten, um damit ein ein
eindringen von Wasser zu verhindern.
3. Das ganze Servo
zusätzlich zu verkapseln, so dass auch dort kein Wasser eindringen
kann.
Zusätzlich gilt es auch die entsprechende Einheit auch zu
lackieren, womit dann auch jegliches Eindringen von Wasser in das
innere der Kapsel verhindert wird. Auch hier sollte die "drop
and forget" Regel greifen.
26.02.2025
Ich
denke, nach den ganzen Erfahrungen mit dem Schwimmkörpern und den
darin verbauten Elementen ist es sinnvoll über eine andere
Konfektion der Schwimmkörper nachzudenken. Ich denke da an eine
steckbare Version von Schwimmkörper plus Verbinder. Diese ermöglicht
dann ggf. bei Problemen eben eine Einheit komplett im System
auszutauschen, ohne die weiteren Einheiten wechseln zu müssen. Das
mittlere Modul bleibt ja bei der vorhandenen Auslegung eh leer, und
ist ein reiner Auftriebskörper. Dort die Akkus zu platzieren habe
ich komplett verworfen. Diese können im Mittelschiff oben im Rumpf,
wie gehabt, ihren Platz finden. Des weiteren ermöglicht diese
Steckversion auch die vertikale Ausrichtung der Schwimmkörper Module
zum einschmelzen der Messingmuttern, da nun ein senkrechte
Ausrichtung vorab möglich ist. Auch möglich ist die einzelnen
Module (Antrieb und Querstrahlruder) durch ggf. neue und moderne
Technik ohne größere Probleme zu ersetzen. Es ist nur ein neues
Modul mit Einbauten nötig, statt den ganzen Schwimmkörper neu
aufzubauen und mit dem Verbinder neu fertig zu stellen. Soweit ich
dafür in den kommenden Wochen Zeit habe werde ich mich mit dieser
Version auseinander setzen. Wir wohl auf eine neue Konstruktion in
Version 3 hinauslaufen.
Da ich
momentan bei der Afa angestellt bin, so habe ich kaum finanzielle
Luft meine Pläne umzusetzen, geschweige den mal bei den Kollegen im
Club in Peine vorbei zu schauen. Ich muss derzeit jeden Euro drei mal
umdrehen, was nervt, und mir gar keinen Spielraum für das Hobby oder
Freizeitaktivitäten übrig lässt. Ich löse sogar derzeit meine
Fundus an vorhandenen Plastikmodellen und anderem Modellbaukram auf,
damit ich überleben kann. Wie ich mich dabei fühle kann sich
mancher sicher vorstellen. Inzwischen macht mein CAD – Lehrgang
auch Fortschritte, und ich hoffe damit bald wieder eine Job zu
bekommen. Jedoch habe ich mir geschworen, sollte ich bis Februar 2026
keine Job bekommen, so werde ich mich nach WHV verkrümeln, und dort
meine Alterssitz vorbereiten.
Soviel erst mal zu der vorhandenen
Situation. Beste Grüße an alle Modellbauer und Freunde des
3D-Druckes. Bis die Tage.
03.03.2025
Liste
der Kleinteile für den ZK Helgoland:
Die folgende Liste der
Kleinteile habe ich dann mal zur Übersicht und Fortschrittskontrolle
erstellt. Ist noch nicht vollständig, aber hilft auf jeden Fall die
Übersicht zu behalten.
laufende Nr.:
|
Benennung:
|
Anzahl:
|
Status:
|
3D-Datei:
|
Fertigungsart:
|
Gewicht gedruckt Stck.:
|
Gewicht Summe:
|
22
|
vorderer Aufbau Bug
|
X
|
fertig
|
|
|
|
|
23 bis 24
|
Diverse Teile
|
X
|
fertig
|
|
|
|
|
24d
|
24d Kasten Bb mitte unter
Niedergang
|
1
|
|
|
|
|
|
27
|
Anbauteile Schornstein Bb und Stb
|
2
|
|
|
|
|
|
27U
|
SCHILD Helgoland Wappen
|
1
|
|
|
|
|
|
27V
|
SCHILD ZOLL BLAU SCHRIFT WEIß
|
2
|
|
|
|
|
|
27W
|
SCHILD Zollwappen hellblau und gold
|
2
|
|
|
|
|
|
27X
|
Filteraufsatz Bb u. Stb 1 und 2 von
vorne
|
4
|
|
|
|
|
|
27Y
|
Filteraufsatz Bb u. Stb 3 von vorne
|
2
|
|
|
|
|
|
27Z
|
Filteraufsatz Bb u. Stb 4 und 5 von
vorne
|
8
|
|
|
|
|
|
28
|
Stützen Brückenschanz 18 x 2
Versionen
|
18
|
|
|
|
|
|
28n
|
Reling und Anbau Aufgang Bug
|
1
|
|
|
|
|
|
28b
|
Halter für Rettungsring Stb
|
1
|
|
|
|
|
|
28c
|
Halter für Rettungsring Bb (28b
gespiegelt)
|
1
|
|
|
|
|
|
29b
|
Niedergang achtern
|
1
|
in Arbeit
|
|
|
|
|
30b
|
Niedergang Stb Haupteck
|
1
|
|
|
|
|
|
31b
|
Niedergang Stb Zwischendeck
|
1
|
|
|
|
|
|
32b
|
Niedergang Bb Zwischendeck
|
1
|
|
|
|
|
|
34
|
Brückenausstattung Basis
|
X
|
in Arbeit
|
|
|
|
|
35c bis x
|
Brückenausstattung (zig Teile)
|
X
|
|
|
|
|
|
36
|
Reling auf Peildeck
|
1
|
|
|
|
|
|
38 bis 38c
|
Zugang Brücke Bb und Stb
|
2
|
|
|
|
|
|
39c
|
Bedienpult Nock Bb
|
1
|
|
|
|
|
|
40c
|
Bedienpult Nock Stb 39c
(gespiegelt)
|
1
|
|
|
|
|
|
41
|
Abweiser Brückenschanz Bb und Stb
2x (einmal gespiegelt)
|
2
|
|
|
|
|
|
43
|
Reling Stb Nock zum Schornstein
|
1
|
|
|
|
|
|
43a
|
Reling Bb Nock zum Schornstein
|
1
|
|
|
|
|
|
44
|
Mast mit Radar und Licht
|
1
|
in Arbeit
|
|
|
|
|
45
|
Mast Aufsatz und Leiter
|
1
|
in Arbeit
|
|
|
|
|
46
|
Block
|
1
|
|
|
|
|
|
47
|
Stromkasten
|
1
|
|
|
|
|
|
48
|
lasergesteuerte
Indentifikationseinheit
|
1
|
|
|
|
|
|
49
|
nautisches Instrument (Details auf
Seite 8)
|
1
|
|
|
|
|
|
50
|
Scheinwerfer
|
2
|
|
|
|
|
|
51
|
Antennenfuß
|
2
|
|
|
|
|
|
53
|
Beleuchtung Kranz Brückendeck
hinten
|
3
|
|
|
|
|
|
54
|
große SAT Kuppel
|
1
|
|
|
|
|
|
55
|
kleine SAT Kuppel
|
1
|
|
|
|
|
|
56
|
Reling Brückendeck
|
1
|
|
|
|
|
|
57
|
Reling Zwischendeck
|
1
|
|
|
|
|
|
58
|
kleiner Ausleger 1
|
1
|
|
|
|
|
|
59
|
kleiner Ausleger 2
|
1
|
|
|
|
|
|
60
|
kleine Hydraulik
|
1
|
|
|
|
|
|
61
|
kleines Beiboot
|
1
|
|
|
|
|
|
62
|
Rettungsinsel orange
|
2
|
|
|
|
|
|
63
|
Rettungsinsel weiß und Halter 2 x
|
2
|
|
|
|
|
|
64a
|
64a Auswurf-Anlage 4 x ???
|
4
|
|
|
|
|
|
66
|
Feuerlöschmonitor
|
1
|
|
|
|
|
|
67a
|
Auswurf-Anlage ???
|
2?
|
|
|
|
|
|
68
|
Sitzbank auf Kasten
|
1
|
|
|
|
|
|
69a-d
|
2 Bänke und Tisch Stb hinter dem
Aufbau
|
1
|
gezeichnet
|
|
|
|
|
69b
|
kleine Bank hinten achtern
Zwischendeck
|
1
|
|
|
|
|
|
70
|
Zugangskasten Stb Mitte
|
1
|
|
|
|
|
|
71
|
Zugang mittschiffs Stb
|
1
|
|
|
|
|
|
72
|
Leiter in der Ausnehmung Stb
|
1
|
|
|
|
|
|
73
|
Verfahrkorb Stb
|
1
|
in Arbeit
|
|
|
|
|
73A
|
Technik Verfahrkorb
|
|
|
|
|
|
|
74
|
Hydraulikeinheit
|
1
|
|
|
|
|
|
75
|
Beiboot Basis
|
1
|
|
|
|
|
|
76
|
Beiboot Anbauten 1
|
1
|
|
|
|
|
|
77
|
Beiboot Anbauten 2
|
1
|
|
|
|
|
|
78
|
Beiboot Auslegerarm
|
1
|
|
|
|
|
|
79
|
Anbauteile für Teil 80 (Details
siehe Blatt 10)
|
1
|
|
|
|
|
|
80
|
Aufnahme Beiboot
|
1
|
|
|
|
|
|
81
|
Lüfter Groß 2 x
|
2
|
|
|
|
|
|
82
|
Zugang Rudermaschinenraum Bb
|
1
|
|
|
|
|
|
83
|
Zugang Rudermaschinenraum Stb
|
1
|
|
|
|
|
|
84
|
Zugang Stb hinten
|
1
|
|
|
|
|
|
85
|
Zugang Bb hnten (84 gespiegelt)
|
1
|
|
|
|
|
|
86
|
Spill (Details)
|
1
|
|
|
|
|
|
87
|
Spill-Steuerung (Detail)
|
2?
|
|
|
|
|
|
88
|
Poller klein
|
10
|
|
|
|
|
|
89
|
Poller Schraubbar
|
8
|
fertig
|
|
|
|
|
90
|
Klüse Hinten rechts und links
|
2
|
|
|
|
|
|
91
|
Klüse Hinten Mitte
|
1
|
|
|
|
|
|
92
|
Lüfter groß 8 x
|
8
|
|
|
|
|
|
93
|
Lüfter groß 7 x
|
7
|
|
|
|
|
|
94
|
Lüfter klein
|
10
|
|
|
|
|
|
95
|
Zugang Bb mitte
|
1
|
|
|
|
|
|
96
|
Reling Hauptdeck
|
1
|
|
|
|
|
|
97
|
Leinenbaum Bb
|
1
|
|
|
|
|
|
98
|
Stelling Bb
|
1
|
in Arbeit
|
|
|
|
|
99
|
Ausleger Stb
|
1
|
|
|
|
|
|
100
|
große Poller
|
8
|
|
|
|
|
|
101
|
Spill
|
2
|
|
|
|
|
|
102
|
Spill oder Spillsteuerung ???
|
2
|
|
|
|
|
|
103
|
Zugang Maschinenraum Bb vorn
|
1
|
|
|
|
|
|
104
|
Zugang Maschinenraum Stb vorn (103
gespiegelt)
|
1
|
|
|
|
|
|
105
|
Winde (siehe Details auf Seite 12)
|
2
|
|
|
|
|
|
106e
|
Umlenkkasten Anker vorn (Details
beachten auf Helgoland)
|
1
|
|
|
|
|
|
106e
|
Schlauch Ankerkette
|
1
|
|
|
|
|
|
107
|
Anker Teil 1
|
1
|
|
|
|
|
|
107a
|
Anker Teil 2
|
1
|
|
|
|
|
|
108
|
Reling vorne
|
1
|
|
|
|
|
|
109
|
Hecklicht an Bb hinten Innenecke
|
1
|
|
|
|
|
|
110
|
Bundesflagge
|
1
|
|
|
|
|
|
X01
|
Oberdecksbeleuchtung
|
40 ?
|
|
|
|
|
|
X02
|
Rettungsringe
|
16 ?
|
|
|
|
|
|
X03
|
Schriftzug HELGOLAND Bb und Stb
|
2
|
|
|
|
|
|
X04
|
Schriftzug KÜSTENWACHE Bb und Stb
|
2
|
|
|
|
|
|
Besonderes
Augenmerk liegt noch auf der ganzen Reling rund ums Schiff. Die
bisherige Auslegung kam ja noch von dem Papiermodell. In Wahrheit
sind aber alle Ecken abgerundet, was bisher nicht berücksichtigt
wurde. Also ist die Reling auch noch ein zusätzlicher Meilenstein,
der ja schon mit der Auslegung auf den Decks beginnt. Ich freue mich
schon drauf! Auf jeden Fall ist das Hauptdeck dahingehend komplett zu
überarbeiten, ggf. auch neu zu drucken, dann in grau. Das
Zwischendeck und Brückendeck haben noch keine Löcher für die
Reling, womit ich mittels Schablonen den bestehenden Aufbau retten
kann. Das Brückendeck macht eh kleine Probleme, und muss auf jeden
Fall noch mal angefasst werden.
05.03.2025
Ich
mache mir derzeit für das Modell keine Illusionen. Der früheste
Termin um ein evtl. fahrendes, aber nicht fertiges Modell
vorzustellen lege ich auf den Beginn des Modellbautages in Winsen /
Luhe am 26. bis 27.07.2025. Bis zum Anschippern des SMC Peine am
27.04.2025 werde ich sicher nicht ein fahrendes Modell ZK-Helgoland
vorweisen können. Ich habe im Mai meinen letzten CAD-Kurs, und
danach Prüfung. Das, und die Jobsuche hat auf jeden Fall Vorrang. Im
Moment habe ich wirklich nach 8 Stunden CAD-Kurs wenig Bock noch
weiter vor dem PC zu sitzen. Es ist ein Hobby, und sollte nicht zur
Arbeit werden, wenn man damit kein Geld verdienen kann.
Da
war doch noch was. Mein Bruder hat mir zu Weihnachten den Presto
Leichtspachtel in der 400 Gramm Verpackung geschenkt. Damit sollte
sich auf jeden Fall so einiges am Rumpf des Kreuzers spachteln
lassen. Die Version mit 240 Gramm hat eine Kunststoffdeckel, in dem
man Härter und Spachtel zusammen die Mengen zusammen abmischen kann.
Die Version mit 400 Gramm leider nicht. Darum habe ich mal eine Runde
rum gerechnet und für beide Fälle einen Mischkörper für beide
Elemente gedruckt, damit man auch für die größeren Mengen was zum
abmischen hat. Dafür sind dann jedoch auch entsprechende Löffel
erforderlich, um das Zeug weitestgehend aus der Mulde heraus zu
holen. Ein „Ausploppen“ aus dem Deckel ist da ja bei dem großen
Gebinde leider nicht möglich. Die Verarbeitung davon ist also
gesichert. Alternativ dazu habe ich aber auch Versuche laufen mit
stinknormalem Wandspachtel von Molto und Obi. Da ja nur ganz kleine
Furchen zugedeckt werden müssen, so scheint es bei den ersten
Versuchen durchaus zu funktionieren. Spachtel daruf und tief
verstreichen, den Rest runter schleifen bis zu den Spitzen des
Druckes, und anschließend lackieren. Sah bisher gut aus, wenn auch
mit Pinsel. Mit der Pistole kann das ganze noch besser aussehen.
Jedenfalls hat sich durch verbiegen der Grundkörper nichts gelöst,
oder ist abgeplatzt. Scheint sich bei PETG durchaus als eine
günstigere Alternative zu bestätigen. Ich werde das weiter testen.
Hier noch ein paar Bilder dazu: